Раздел: Документация
0 ... 48 49 50 51 52 53 54 ... 143 Продолжение Шабл. 5J. Схема корректирующего пассивного контура Передаточная функция Логарифмическая амплитудная характеристика Амплитуднофазовая частотная характеристика \Я2\ 1 о * 1 1 + К(0) = r? + R3Я4 1 Т2Р± I /?, 7> + 1 1 + Яг r2 + r3 1 i + 1L + А Ч/ (ш) = arctg Ггш — arctg Tjco; R2R$ r2 + r> С; Тг — 1 +— + — + R-z я, 1 + R,
Я» + Я3 /?, <?5 О 1 1 7? 7г ■20дБ/6ека6у jQM О 1 11« т * а Иитегро-диффереицирующие контуры ТгТ2р* + (7\ + Г2) р + 1 К (0) = 1; /С (оо) = 1; Т1 = R2C2; Т2 = fljC, Ш), дБ О /т,т, f2 -208Б/декаду гст/деЩ/ 1   К(р) = Т,Т+(Тг + Т2)р+1 R2 + Rs + Ri + ■ R* + Я, K(0) l 1 + R, ; ДС(оо)=1; Л, + Я, RRs = D "Б2 r= RlCl kt -\- ks K(P) = TiT2p*-\-(T, + T2) + 1 TlT2 I 1 + —Mi L /?,(/?! 4 /С (0) = 1; /C(oo),--- + Я2) + T, 1 P2 + p + 1 1 R,R2 Rz <tf, + R2) Тг = Е3С2; T2 = (R. + R2) Ct if (pX = 7\7>* + 7> + 1 7W + + T2\p+\ K(0)=1; K(oo)=l; Ri + Rt ■C2; Г2 = (/?, + /?2) C, 0 ft 5 20дБ/деквду Ti>h co=0 4M=R2=R3=1; Cf=0,S; C2=2 Uu), дБ 1 ± T,>T* Ti Tz 20дБ/декаду О Г,?Гг u>=c° p£i) R1=R2=R3=1; C1=0,5;C2*2 Ш1 dS
Рис. 5.16. Амплитудно-модулнрованное напряжение несущей частоты (а) и напряжение с опережающей по фазе огибающей (б). 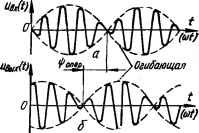 вс be "S" H2lh R2 i 4!L му1 Обратная связь Рис. 5.17. Коррекция следящих систем корректирующим устройством переменного тока первого типа (фазовый дискриминатор — корректирующий контур — модулятор). тока ДК, затем снова модулируется модулятором MD. Выходное напряжение модулятора усиливается усилителем переменного тока У и подается на асинхронный двигатель М. Последний выполняет функцию фазового демодулятора. При изменении фазы напряжения несущей частоты в обмотке управления Wy асинхронного двигателя на 180° направление его вращающего момента Мвр изменяется на противоположное, а величина Мвр пропорциональна величине подводимого к обмотке управления напряжения. Следовательно, вращающий момент асинхронного двигателя пропорционален огибающей модулированного по амплитуде напряжения несущей частоты. Благодаря наличию фазового дискриминатора DM корректирующее устройство первого типа может работать как при амплитудно-мо-дулированном, так и при фазомодулированном напряжении на входе. Корректирующие устройства переменного тока первого типа применяются для коррекции многих САУ. Однако устройства этого типа имеют недостатки, заключающиеся в том, что демодулятор уменьшает отношение сигнал/шум (на выходе демодулятора имеет место пульсирующее напряжение, содержащее в своем спектре вредные высшие Тармоники), а фильтры демодулятора и модулятора вносят существенное запаздывание, чем уменьшают эффект коррекции, создаваемый корректирующим контуром постоянного тока. Кроме того, сама схема устройства первого типа является довольно сложной. Корректирующие устройства переменного тока второго типа — контуры несущей частоты — осуществляют преобразование огибаю- 0 ... 48 49 50 51 52 53 54 ... 143 |
|||||||||||||||||||||












