Раздел: Документация
0 ... 51 52 53 54 55 56 57 ... 143 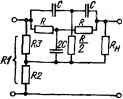 о—-1-о где Г, = 1 + jQTi 1 + /От2 a 2 + — B»[+(2 + v)1 Я3 + Я2 °" R« RC n = ■ R *eB(W«« !±Hi. 41 + jOr, где Tt — RC = t2 = Ta; a 0 m = m2 + 2 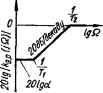
От Q = 0 до G = (0,2 . . . 0,3) co„ при rt = 1, до fi = (0,5 . .. 0,6) coD при n = 00 От Q = 0 до Q= (0,6 ... 0,7) co0 Здесь Q — частота модуляции; Ui — несущая частота видно, что приближенные характеристики с отклонениями, не превышающими 3 дБ по ЛАЧХ и 5° по ЛФЧХ, совпадают с точными до частоты модуляции Q = (0,6...0,7) со0. Из формулы (5.27) следует, что величины 7\ и т2 могут изменяться, однако они связаны между собой таким образом, что каждому значе- нию Тг соответствует строго определенное значение т2, причем большим 7\ соответствуют меньшие значения т2. В качестве примера на рис. 5.23 показана схема следящей системы переменного тока, в которой для коррекции использован дифференцирующий фазоопережающий мостовой Т-образный /?С-контур несущей частоты. На рисунке приняты следующие обозначения: ВС — сельсин-датчик, BE — сельсин-приемник, М — двухфазный асинхронный двигатель, Ред — редуктор, ВВ — ведущий вал, ПВ — приемный вал, РМ — рабочий механизм. В этой системе в качестве элемента сравнения использованы сельсины ВС и BE в трансформаторном режиме работы, а функции исполнительного двигателя и фазового дискриминатора, преобразующего амплитудно-модулированное напряжение управления в постоянную величину (момент вращения), изменяющуюся по закону изменения огибающей рабочей составляющей этого напряжения, выполняет двухфазный асинхронный двигатель М. Часто вместо асинхронного двигателя для этой же цели применяется универсальный коллекторный двигатель. Наряду с мостовым Т-образным #С-контуром несущей частоты для коррекции САУ переменного тока применяются и другие RC и RLC-контуры несущей частоты. Из #С-контуров наибольшее распространение получил двойной Т-образный С-контур несущей частоты. В табл. 5.2 [17] приведены схемы двойного и мостового Т-образных RC-контуров несущей частоты, их приближенные эквивалентные передаточные функции и логарифмические амплитудные характеристики, указан диапазон частот, в котором справедливы приближенные передаточные функции и логарифмические частотные характеристики. Достоинства и недостатки дифференцирующих фазоопережающих контуров несущей частоты. Двойной и мостовой Т-образные RC-koh-туры благодаря своей простоте нашли широкое применение в качестве корректирующих фазоопережающих устройств переменного тока в САУ. Однако этим контурам присущи существенные недостатки, ограничивающие их использование. 1.Контуры несущей частоты, как видно из эквивалентных частотных характеристик (см. рис. 5.21, 5.22), создают не только опережение огибающей, но в некотором диапазоне частот, расположенном сразу же за частотой модуляции Q, равной несущей частоте со0 (Q = со0 = = сон), вносят также отставание. Из-за этого применение контуров несущей частоты ограничивается системами автоматического управления, имеющими довольно низкие значения частоты среза Qc (Qc <! < Q = со0), поскольку необходимо, чтобы частота среза системы совпадала с областью частот, в которой контур вносит максимальное опережение. 2.Некоторые постоянные времени контуров фиксированы (по- стоянная времени отставания у двойного контура) либо однозначно связаны между собой (мостовой контур), т. е. контуры имеют сравнительно «жесткие» ЛЧХ. Поэтому не всегда удается с помощью контуров несущей частоты скорректировать систему, так как требуемые постоянные времени корректирующего устройства могут иметь самые различные значения. 3.Контуры настраиваются на несущую частоту, в связи с этим их эквивалентные частотные характеристики, а следовательно, и характеристики систем, содержащих эти контуры, изменяются в зависимрс-ти от ухода несущей частоты; частотные характеристики также чувствительны к изменениям параметров контуров. 4.Кроме рабочей составляющей, на выходе контуров имеет место квадратурная составляющая, которая может вывести элементы системы из зоны линейности и тем самым уменьшить усиление рабочей составляющей. 5.Контуры, максимально ослабляя сигнал, без существенного затухания пропускают гармоники напряжения несущей частоты. Эти гармоники на выходе контуров имеют тем большее значение относительно сигнала, чем большую эквивалентную постоянную времени производной Тг имеют контуры и чем сильнее напряжение несущей частоты отличается от идеальной синусоиды. В работе [17] рассмотрены некоторые способы изменения в желаемом направлении эквивалентных частотных характеристик и улучшения показателей качества работы контуров несущей частоты (уменьшения чувствительности к уходу несущей частоты, уменьшения квадратурной составляющей), что позволяет расширить область применения этих простейших по своей схеме контуров, как корректирующих устройств систем управления. 5.6. Коррекция САУ при помощи параллельных корректирующих устройств (коррекция обратными связями) Возможность коррекции САУ с помощью параллельных корректирующих устройств Способ последовательной коррекции САУ, рассмотренный выше, широко используется на практике. Однако во многих случаях коррекцию САУ оказывается более целесообразно осуществлять с помощью не последовательных, а параллельных корректирующих устройств, т. е. корректирующих устройств, включаемых в цепи местных обратных связей. Возможность коррекции САУ параллельными корректирующими устройствами вытекает из возможности замены последовательного корректирующего устройства равносильным параллельным. В этом нетрудно убедиться. Пусть, например, часть системы с передаточной функцией К0 (р) охвачена обратной связью, содержащей корректирующее устройство с передаточной функцией Ко.с (р) (рис. 5.24, а). Пере- 0 ... 51 52 53 54 55 56 57 ... 143 |
||||||||||||












