Раздел: Документация
0 ... 86 87 88 89 90 91 92 ... 143 благодаря чему производные непрерывной функции х (t) можно заменить соответствующими разностями дискретной функции х [л], которые легко поддаются измерению. С учетом (8.89) и (8.90) выходную величину экстраполятора в период I = л + е следует формировать в соответствии со следующим законом экстраполяции хэ [л, е] = х [л] + Ах [л — 1] е + (V2!) А2х [п — 2] е2 + • • • S ••■ +(l/s\)Asx[n— s]es = £(l/v!)AMn — v] ev. (8.91) v=0 Типы экстраполяторов в зависимости от закона экстраполяции Значение самой координаты х [л] и разностей меняется от интервала к интервалу при изменении закона движения цели. Вероятно, что во многих случаях удовлетворительное приближение будет достигнуто, если в качестве закона экстраполяции взять несколько первых (например, два, три) членов ряда (8.91). Если закон экстраполяции имеет вид хэ [л, е] = х [л],(8.92) то экстраполятор, реализующий этот закон, называется экстраполя-тором нулевого порядка. В качестве такого экстраполятора обычно применяется фиксатор (рис. 8.44). Для выполнения экстраполяции по закону (8.92) необходимо знание только одного значения входной функции — величины х [л]. Если входная координата изменяется, то возникает ошибка экстраполяции, которая к концу периода может достигать значительной величины (см., например, Ах [0], рис. 8.44). Экстраполятор первого порядка имеет линейный закон экстраполяции: Хэ[п, е] = х[п] + Ах[п— 1]е.(8.93) Так как первая разность Ах [п — 1] = х [л] — х [л — 1] возникает за время t = Т, т. е. t = tIT = 1, то она соответствует скорости изменения координаты цели за последний (л— 1)-й период. Поэтому выходная величина в следующий л-й период будет изменяться со скоростью, измеренной за предыдущий период (рис. 8.45). Благодаря этому точ- лЫ,
I I I I 0 12п Рис. 8.44. Экстраполятор нулевого порядка. х[п]
х3(Ь U 1 2п Рис. 8.45. Экстраполятор 1-го порядка. 0 12 Ы01 I I I I 1— 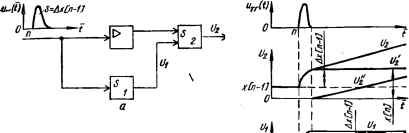 Рис. 8.46. Схема экстр аполятора 1-гоj 1 порядка (а) и формы напряжений иг°*-—*— его элементах (б).6~ ность экстраполяции будет выше по сравнению с экстраполятором нулевого порядка при линейном или более сложном законе изменения координаты цели. Для экстраполяции по линейному закону (8.93), в частности для определения Ал: [п — 1] = х [п] — х [п — 1], необходимо знать два предыдущих значения функции: х [п] и х [п — 1]. Разность Ах [п — 1] измеряется в дискретный момент п. Для формирования непрерывной кривой по линейному закону применяются интегрирующие элементы (рис. 8.46, а). Формирование первого члена закона экстраполяции (8.93) осуществляется в соответствии с выражением х [п] = х [п — 1] + Ах [п — 1]. Если на вход схемы рис. 8.46, а подать короткий импульс напряжения ытг (t), площадь которого s — Ах [п — 1] (т. е. площадь импульса равна первой разности), то этот импульс, поступив на интегратор 52, вызовет изменение напряжения на его выходе от значения х [п — 1], соответствующего предыдущему периоду, на Ах [п— 1] (рис. 8.46, б). Благодаря этому в момент t = п выходное напряжение S2U2 — х [л] = х In — — 1] + Ах [п — 1], т. е. соответствует первому члену закона экстраполяции. Этот же нмпульс напряжения поступает на интегратор 51. Так как первая разность Ах [п — 1 ] соответствует скорости изменения координаты в предыдущем периоде, то на выходе 51 возникает постоянное напряжение Ult пропорциональное этой скорости: иг = Ах [п— 1]. Напряжение Ult поступая на 52, вызывает на его выходе линейно изменяющуюся составляющую напряжения U2 = Ах [и — 1] е, соответствующую второму члену закона экстраполяции. В результате сложения напряжений 1/2 и £/•> на выходе 52 получается линейно изменяющееся напряжение U2 со скоростью, равной скорости изменения координаты в предыдущий период, т. е. реализуется линейный закон экстраполяции (8.93). Экстраполятор второго порядка осуществляет квадратичный закон экстраполяции х3 [п, в] = х [п] + Ах [п — 1 ] е + (V2) А2х [и — 2] е3 (8.94) и может быть выполнен с помощью трех интеграторов. Формирующие и фильтрующие устройства Рис. 8.47. Функциональная схема замкнутой системы экстраполяции. В общем случае экстраполятор, осуществляющий преобразование дискретной функции в непрерывную в соответствии с законом экстраполяции в виде полинома 5-й степени, называется экстраполятором 5-го порядка. В технике наибольшее распространение получили экст-раполяторы первого порядка. Экстраполирующие устройства выполняются, как правило, в виде систем с обратной связью (рис. 8.47). Сравнение выходного проэкстраполированного сигнала с входными дискретными данными, определение необходимого числа разностей в соответствии с принятым законом экстраполяции может осуществляться автоматически самой системой. Но в технике применяются также полуавтоматические системы, в которых задачу устранения ошибок в дискретные моменты выполняет человек-оператор. 8.10. Полуавтоматические (эргатические) системы управления Характеристика полуавтоматических систем управления. Математическая модель человека-оператора В замкнутый контур полуавтоматической системы входит как элемент системы человек-оператор (рис. 8.48). Примером такой системы может служить полуавтоматическая система экстраполяции координат, система управления положением одной из осей летательного аппарата и т. д. Оператор с помощью визуального устройства сравнивает входную и выходную величины (задающее воздействие и управляемую величину), выявляет ошибку и уменьшает или устраняет ее с помощью соответствующих управляющих движений (перемещением рукоятки кнюппельного механизма, вращением штурвала). От действия человека-оператора зависят динамические свойства системы в целом. Поэтому его реакция должна быть согласована с требованиями устойчивости, динамической точности системы. Человек, участвующий в каком-либо процессе и имеющий возможность активно вмешиваться, визуальное Выходная г-44
Выходная величина системы Сигнал обратной связи Рис. 8.48. Функциональная схема полуавтоматической системы, 270V 0 ... 86 87 88 89 90 91 92 ... 143 |
|||||||||||||||||||||||||||||












