Раздел: Документация
0 ... 88 89 90 91 92 93 94 ... 143 подается также на интеграторы S1 и 52 системы экстраполяции (рис. 8.46, а). При поступлении импульса напряжения ытг (/) на выходной интегратор 52 напряжение на его выходе и системы, соответствующее х [п — 1], изменяется на величину ошибки Ах [п — 1] (вводится корректура по координате) (рис. 8.46, в, кривая t72) и тем самым устраняется ошибка системы экстраполяции по положению. При этом формируется первый член х [п] закона экстраполяции (8.93): х [п] = = х [п — 1] + Ах [п — 1]. Ошибка воспроизведения Ах [п — 1 ] возникает за время Т одного периода вращения антенны (п = 1), поэтому, как отмечалось, она соответствует отклонению скорости изменения координаты, вырабатываемой системой экстраполяции, от скорости цели в предыдущий (п — 1)-й период. При подаче импульса напряжения тахогенератора итг (t), площадь которого пропорциональна отклонению скорости (первой разности Ах [и — 1]) на интегратор 51, изменяется напряжение на его выходе С/г (t) на величину, пропорциональную первой разности Ах [п — 1], т. е. на величину, пропорциональную ошибке по скорости (рис. 8.46, б). Благодаря этому введению корректуры по скорости, напряжение Ux (t) становится пропорциональным скорости изменения координаты цели в предыдущий (п — 1)-й период. Подавая напряжение иг (t) на второй вход интегратора 52, на его выходе появляется линейно изменяющаяся во времени составляющая напряжения (кривая t72, рис. 8.46, б), соответствующая второму члену Ах [п— Не закона экстраполяции (8.93). Выходное напряжение интегратора 52 и системы в целом U2 (t) в интервале времени п 1 <С п + 1 равно сумме составляющих напряжений V% и U%. Таким образом, реализуется линейный закон экстраполяции (8.93). Напряжение U2 (t) с выхода интегратора S2 перед появлением следующей отметки от цели на И КО и вводом корректуры передается на интегратор 53 рассмотренной полуавтоматической системы (рис. 8.49). ГЛАВА 9 Цифровые системы автоматического управления 9.1. Определение цифровой САУ. Функциональные схемы цифровых систем Для повышения показателей качества САУ часто в них включают цифровые ЭВМ или цифровые вычислительные устройства (ЦВУ). САУ с цифровыми ЭВМ или ЦВУ называются цифровыми системами автоматического управления, или цифровыми автоматическими системами (ЦАС). В ЦАС ЦВУ можно включать вне замкнутого контура управления вц[п,0] Э\ЦВУ вц.о[п,01 в0({) =анч 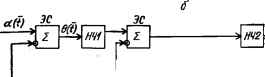 - Л «=- d(f) эс ЦВУ нч /3(f) Яц[п,0 е Рис. 9.1. Функциональные схемы цифровых автоматических систем. (рис. 9.1, а), в замкнутый контур управления (рис. 9.1, б, в) и в качестве элемента сравнения (рис. 9.1, г). В системах первого типа с помощью аналогово-цифрового преобразователя (АЦП) AID непрерывное (аналоговое) воздействие a (t) преобразуется в цифровой код осц [п, 0]. ЦВУ на основании поступающей информации ац [п, 0] вырабатывает оптимальное задающее воздействие Оцо \п, 0]. Последнее с помощью цифро-аналогового преобразователя (ЦАП) DIA преобразуется в непрерывный сигнал ос0 (/) и поступает на элемент сравнения (ЭС) замкнутой системы. Замкнутый контур системы может быть непрерывным (НЧ) либо импульсным. Достоинство такой ЦАС состоит в простоте изменения программы ЦВУ, в соответствии с которой вырабатывается задающее воздействие. В системах второго типа (рис. 9.1, б) ЦВУ, включенное в прямую цепь замкнутого контура системы, выполняет роль последовательного корректирующего устройства. В системах третьего типа (рис. 9.1, в) ЦВУ включено в цепь местной обратной связи, охватывающей непрерывную часть НЧ2 системы и является параллельным корректирующим устройством. Цифровые корректирующие устройства в этих системах позволяют реализовать сложные алгоритмы управления, т. е. значительно улучшить динамические свойства систем. В системах четвертого типа (рис. 9.1, г) ЦВУ выполняет функции элемента сравнения и корректирующего устройства. В этой системе на цифровой элемент сравнения задающее воздействие ос (t) и управляе- мая величина В (t) поступают в цифровой форме — в виде /«-разрядных двоичных цифровых кодов осц [п, 0] и Вц [п, 0]. На выходе элемента сравнения сигнал рассогласования также получается в виде т-раз-рядного двоичного кода 8Ц [п, 0] = ац [п, 0] — Вц [п, 0], который в ЦВУ с целью улучшения динамических свойств системы соответствующим образом преобразуется в другой двоичный цифровой код 8цо In, 0]. С помощью преобразователя D/A цифровой код преобразуется в непрерывный сигнал 80 (г), поступающий на непрерывную часть НЧ системы. ЦАС четвертого типа обладает всеми качествами первого, второго и третьего типов, а благодаря более высокой разрешающей способности элемента сравнения обладает более высокой точностью. 9.2. Преобразователи непрерывных величин в цифровой код и цифрового кода в непрерывную величину Преобразователи непрерывных (аналоговых) величин в цифровой код (АЦП) A/D Преобразователи непрерывных величин в цифровой код являются устройствами, которые преобразуют непрерывную физическую величину в дискретную цифровую форму. Цифровой код характеризуется системой счисления. Напомним, что целое число N можно представить в любой системе счисления с основанием В в виде N = апВГ + ап , В"-1 + • • • + агВ1 + а0В°, где а„, а0 — коэффициенты разряда, принимающие значения от 0 до В-1. Для двоичной системы счисления В = 2, а,- = 0,1 и Л/=с„2" + ал ,2"-1+ ••• +а121 + а02°. Для десятичной системы счисления В = 10, щ = 0, 1, 9 и W = a„10" + a„ il0"-I+ ••• + а + аОР. Например, число 35 в десятичной системе счисления равно 35 = = 3 • 101 + 5 - 10°, а в двоичной 35 = 1 • 28 + 0 - 24 + 0 . 2s + + 0 • 22 + 1 • 2*+ 1 • 2° или 100011. В настоящее время применяется большое количество преобразователей, которые можно разделить на три группы: 1) преобразователи пространственных перемещений в цифровой код; 2) преобразователи электрических величин (напряжений, токов, сопротивлений) в цифровой код; 3) преобразователи интервалов времени в цифровой код. Преобразователи пространственных перемещений преобразуют в цифровой код углы поворота и линейные перемещения. Преобразователи угол-код делятся на преобразователи считывания и преобразователи последовательного счета. В преобразователях считывания угол поворота вала выдается со считывающего устройства непосредственно в двоичном коде. Основным элементом преобразователя является диск или барабан с кодовой шкалой (маской). На 0 ... 88 89 90 91 92 93 94 ... 143 |












