Раздел: Документация
0 ... 91 92 93 94 95 96 97 ... 143
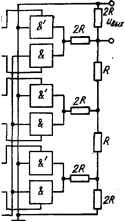 Преобразователи цифрового кода в непрерывную величину D/A Преобразователи код-напряжение. Для преобразования цифрового кода в напряжение используются сопротивления, соединенные по определенной схеме, включение которых на источник эталонного напряжения иэ происходит в соответствии с декодируемым числом. Выходное напряжение ыВЬХ, снимаемое с нагрузки, пропорционально декодируемому числу. Основным типом преобразователей код-напряжение являются преобразователи с суммированием напряжений на аттенюаторе сопротивлений. Вариант схемы, обеспечивающей преобразование трехразрядного двоичного кода в напряжение, изображен на рис. 9.9. Преобразуемый код Ах = и8и2иг (где щ — единица или нуль t-ro разряда) в виде напряжений параллельно поступает на разрядные триггеры Tt регистра, которые управляют схемами И и И. Аттенюатор составлен из резисторов R и 2R таким образом, что нагрузка для эталонного напряжения иэ в схеме каждого разряда равна 3R. При преобразовании кода Ах — 1.2s + 0.22 + 0.2°, u3 — 1, u2 = — иг = 0 напряжением триггера ТЗ открывается схема И и ua подается на схему аттенюатора. При этом мВЬ1Х = (V3) u3. В общем случае напряжение на выходе схемы 1 1 вых — 2 22 w э для п-разрядного преобразователя 1 I Рис. 9.9. Преобразователь код-напряжение с суммированием напряжений иа аттенюаторе сопротивлений. ■иа{ц32* + и221 + иг2°), Мъых — 3 2"- , 2 щ2{- i Чтобы преобразовать числа разных знаков, необходимо на входе схемы установить знаковый триггер, а на выходе схемы предусмотреть возможность получения напряжения разной полярности. Данные преобразователи обладают высоким быстродействием (время преобразования не превышает единиц микросекунд), достаточной точностью (точность преобразования может быть доведена до 0,05...0,1 %), имеют сравнительно простую схему и обеспечивают пропорциональное преобразование кодов с числом разрядов п 10, что вполне достаточно для цифровых автоматических систем. Преобразователи код-напряжение с суммированием токов на аттенюаторе могут обеспечить более высокую точность, но для их построения требуется п высокостабильных источников тока, где п — число разрядов преобразуемых кодов. 9.3. Примеры цифровых автоматических систем Цифровые следящие системы (ЦСС) Щ Среди цифровых следящих систем получили широкое применение системы, обеспечивающие преобразование цифрового кода в угловое перемещение. В зависимости от типа исполнительного двигателя ЦСС подразделяются на системы с непрерывным и шаговым исполнительными двигателями. Цифровая следящая система с непрерывным исполнительным двигателем (рис. 9.10, а). Угол поворота a (t) ведущего вала с помощью преобразователя угол-код У/D преобразуется в цифровой код ац [п] и поступает на элемент сравнения ЭС системы. При необходимости выработки задающего воздействия по определенной программе после преобразователя У/D может включаться цифровое вычислительное устройство ЦВУ. На ЭС системы задающее воздействие в виде4 цифрового кода может поступать также от программного задающего устройства. Угол поворота приемного вала В (i) (управляемая величина) с помощью преобразователя угол-код У/D, включенного в цепь обратной связи, преобразуется в цифровой код Вц [л] и подается на ЭС. На выходе 1 ЭС возникает цифровой код 8Ц [л], равный разности ац [л] и Вц [л]. Этот код подается на преобразователь код-напряжение DIH, на выходе которого возникает напряжение ue(t), пропорциональное коду 8Ц [л]. Напряжение Ле (t) усиливается усилителем У и используется для управления исполнительным двигателем М. Последний поворачивает вал рабочего механизма РМ в сторону уменьшения рассогласования 8Ц [л]. Отработка прекратится лишь тогда, когда снимаемое с У ID число Вц [л] станет равным задающему числу ац [л]. На выходе 2 элемента сравнения образуется управляющий сигнал, зависимый от знака кода 8Ц [л]. Этот сигнал подается на переключаю-i; Ыа[п] ЭС rj 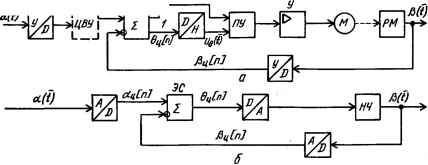 Рис. 9.10. Функциональная схема ЦСС с непрерывным исполнительным двигателем \а) и обобщенная функциональная схема ЦСС (б). оСцСп] ЭС вц[п] I--1 - 1аД/ I /до alt) Рис. 9.11. Функциональная схема ЦСС с шаговым двигателем. щее устройство ПУ и соответствующим образом изменяет полярность или фазу напряжения, подаваемого с DIH на усилитель У. Не изменяя динамических свойств, функциональную схему ЦСС (рис. 9.10, а) можно преобразовать к виду рис. 9.10, б, в которой преобразователи угол-код У/D заменены с целью получения более общей схемы на преобразователи непрерывной величины в цифровой код AID. Непрерывная часть НЧ системы включает усилитель У, исполнительный двигатель М и рабочий механизм РМ. Цифровая следящая система с шаговым двигателем (рис. 9.11). Особенностью ЦСС с шаговым двигателем ШД в качестве исполнительного элемента состоит в том, что цифровой код рассогласования на выходе элемента сравнения ЭС преобразуется не в непрерывное напряжение, как в системе рис. 9.10, а, а в число импульсов с помощью преобразователя DIM. При поступлении импульса напряжения на шаговый двигатель ШД с выхода усилителя У ротор двигателя поворачивается на определенный угол-шаг. Вращение ротора прекратится, как только двигатель повернет ведомый вал на такой угол, при котором число 3„ In] станет равным числу ац [п]. Устойчивость ЦСС с ШД определяется динамикой работы шагового двигателя, в котором время переходного процесса равно времени отработки одного импульса. ИЭ1 САУ с микропроцессором для управления технологическим процессом Упрощенная схема системы с микропроцессором изображена на рис. 9.12. Аналоговая (непрерывная) информация об управляемых параметрах (например, о температуре, химическом составе, вязкости сырья, влажности, давлении) технологического процесса поступает на автоматические управляющие устройства ЛУУ, осуществляющие стабилизацию того или иного параметра технологического процесса на уровне, заданном уставкой. Эта же информация поступает на микропроцессор М/С/7, где преобразуется в цифровой код и в соответствии с заложенной программой вырабатываются управляющие воздействия. Последние, поступая на АУУ, изменяют их уставки таким образом, что при изменении пара- вы АУУ1 Технологический процесс АУУ2 «- V V V МКП Рис. 9.12. Микропроцессорная система автоматического управления технологическим процессом. 0 ... 91 92 93 94 95 96 97 ... 143 |
|||||||||||||||||||||||||||||












