Раздел: Документация
0 ... 9 10 11 12 13 14 15 ... 87
Граничные условия: uj=vj=u3 v3 = 0,F2x=P]tF2y Вычеркивая 1,2, 5 и 6 столбцы и строки, получим: ЕА 2L 2 О О 2 "2 Решая эту систему уравнений, получим искомые перемещения в узле 2: W еа\р2\ Б. Согласно (2.20), получаем формулы для напряжений в обоих стержнях: [0 °1 Е42 L 2 [-1 -1 1 ХЕАЛ а2=тт[1 1 -11] ЕА 0 Pi {Pi Р2 о о Задача решена. ШХШ 2. Для плоской стержневой конструкции, изображенной на рис. 2.10, дано: Р = Ю00 кН, L = 1m. Е = 210ГПа. (для элементов У н 2), Q А~ 62x10 4м2 (для элемента 3). "Ределить перемещения и реакции опор. Г7®Щ£- Составим глобальную матрицу жест-Для всей конструкции. Для элемента У: и , I = и, ТП — 1. Матрица жесткс-* глобальных координатах: 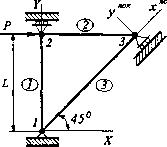 Рис.2.10 1 ujVy u2 v2 00 0 0 010-1 00 0 0 0-101 (Н/м). Для элемента 2: в = 0 1 = 1, тп—Q. Матрица жесткости для этого элемента: и2 v2 и3 v3 {?10х10д)к,0х10-4) 1 1 0 -1 ООО -1 0 1 (Н/м). 0 0 0 0 Для элемента 3: 0 = 45°; 1=14 = 42/2. Матрица жесткости: щ vy u3 v3 \?10х109\б2х10-4) 3гт г2 0,5 Of -0,5 -Oj 0,5 Of -Oj -Of -0,5-Of Oj 0,5 -Oj-0,5 Oj 0,5 (Н/м). Система уравнений равновесия для всей конструкции: 1260Х105
Обращаем внимание на то, что индексы X, Y вектора сил соответствуют глобально* системе координат. Граничные условия: ufo6 = vfo6 = угюб = 0; улок = 0; F2X=P,F3T=0. После преобразования приведенной выше системы уравнений с учетом граничных ус ловнй получим: vf* = + vfo6)=0. ..глоб „глоб п Отсюда: и3 -v3 = 0. Получим также выражение для силы в узле 3: 42 J2 ~н3х ~ для учета нагрузки н граничных условий в уравнениях равновесия вычеркиваем 1,2 и 4 строки и столбцы. После этого получим:
Учитывая равенство и3 — Vj = 0, а также соотношение между силами в узле 3, перепишем предыдущее выражение в виде:
Из приведенного выше матричного уравнения следует: 1260Х105
Отсюда получаем: F3% = —1260x10s и3. Сложение 2 и 3 строк дает: " 1 -1 1260x10s -1 3 Решив эту систему уравнений, получим перемещения: \и2]1 \ЗР\ \0J0U91 \ и3\ 2520x10s [Р J \0№3968\ (м). Из глобального конечно-элементного уравнения в матричной форме можно вычислить все реакции опор. Задача решена 2.2.4. Произвольное расположение элементов в пространстве Аналогично тому, как это делалось в п. 2.2.3 для Цементов, произвольно расположенных на плоско-ти> элементы матрицы жесткости сначала за-, ываются в локальной системе координат х, у, г >Ис-2.П)) а затем трансформируются в глобальную си«ему координат X, Y. Z. 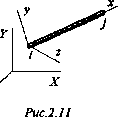 0 ... 9 10 11 12 13 14 15 ... 87 |












