Раздел: Документация
0 ... 17 18 19 20 21 22 23 ... 87
8 Снова £ N = J в любой точке внутри элемента. /=/ f Поле смещений определяется уравнениями: 88 m=£/V.m., v=i;/V.v.(3.39) которые представляют собой квадратичные функции. Деформации н напряжения в точках в пределах четырехугольного 8-узлового элемента являются линейными функциями координат, что позволяет более точно рассчитать напряжения и деформации, чем с помощью 4-узловых элементов. В заключение отметим, что применение квадратичных треугольных или четырехугольных элементов с шестью или восемью узлами соответственно позволяют моделировать тела с криволинейной границей, что повышает точность результатов моделирования. 3.6. Преобразование нагрузки Помимо сил, которые в расчете можно трактовать как сосредоточенные, на элементы конструкции действуют также поверхностные силы (например, внутреннее давление) н объемные силы (например, вес). Как поверхностные, так н объемные силы являются примерами распределенной нагрузки, которая в соответствии с принципами метода конечных элементов не может быть непосредственно приложена к элементу, а должна быть трансформирована к узлам. Приведение распределенной нагрузки к узлам основано на сравнении энергии упругих деформаций. С использованием этого принципа в п. 2.2.2 сформулированы правила трансформации распределенных нагрузок для одномерных стержневых и 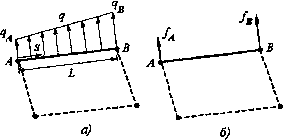 Рис. 3.8 70 52l Рассмотрим правило трансформации поверхностной нагрузки, равномерно распр, леииой вдоль стороны четырехугольного элемента. Предположим, что лииейио распр леииая поперечная нагрузка д приложена к стороне АВ линейного четырехуголц элемента (рис. 3.8 а). Введя локальную координату S вдоль стороны АВ, запишем выражение для рац W нагрузки Q: W =t\u {s)q{s)ds, q 0 п где t — толщина элемента, L — длина его стороны, вдоль которой приложена нагру д, U — величина составляющей перемещения, нормальной к стороне АВ приложу я нагрузки. Для линейного четырехугольного элемента с учетом (2.5) имеем: 11» = , S 1S 1— и , +—U „. l) пА I пВ Линейная поперечная нагрузка q(s) также может быть описана аналогичной форщ. Таким образом, для работы W получим: [l-s/L s/L]\ (l-s/L)2 {s/Lll-s/D {[s/Lll-s/D (s/L)2
lUnA UnB\ tL = \u . и I — пА nB* ft 2 1 1 2 *в\ откуда находим вектор эквивалентной нагрузки в узлах (рис. 3.8 Ь): I/. tL 6 2 1 1 2 Ли В частном случае, при q = COKSt, получим: if (3.« Лля 1свадратнчных элементов (треугольных или четырехугольных) с промежуточным посредине стороны распределенная нагрузка перераспределяется не по двум узлам, ""вьиие описанном случае, а по трем узлам. к3* диалогичным же образом приводится к узлам и распределенная нагрузка, касательная -аанице," объемная нагрузка. * Напряжения в точках элемента вычисляются по следующей формуле:
(3.45) Здесь [в] — матрица дифференцирования перемещений; {d}— вектор смещений узлов, которые должны быть известны для каждого из видов примененных элементов после решения глобальной системы уравнений. 3.7. Пластины и оболочки 3.7.1. Основные соотношения теории пластин и оболочек Элементы конструкций плоской формы, весьма широко распространенные в строительстве н технике, принято рассчитывать как пластины. Пластиной называют плоское тело любой формы в плане, толщина которого мала по сравнению с другими линейными размерами. Расчетная схема элемента пластины приведена иа рис. 3.9. В нем выделяют срединную поверхность, параллельную внешним поверхностям, делящую толщину пластины пополам. Координата z в направлении толщины пластины, как правило, отсчитывается от срединной поверхности. Эпюры нормальных и ка- 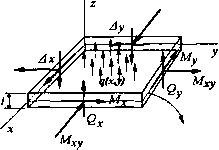 Срединная плоскость Рис. 3.9 ительных напряжений представлены на рис. 3.10. Имеют место следующие вполне оче-виДные соотношения между нагрузками н напряжениями: 1)изгибающий момент (на единицу длины): t/2 М = f a zdz (Нм/м); х;, X -t/2 (3.46) t/2 М = [ О Z dz (Нм/м); У -1/2 У (3-47) 2)крутящий момент (на единицу длины): 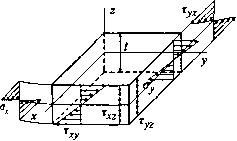 Рис.3.10 0 ... 17 18 19 20 21 22 23 ... 87 |












