Раздел: Документация
0 1 2 3 4 5 6 ... 87 Проверка: Га ЪТ1\а Ь] 1 \d -bla b] \l О] [cd\ [с dj-faa-bcl-c a\cd\ [о l\ (ad-bc)l Решение системы линейных уравнений (2.1) в предположении, что матрица А не сингулярная, может быть записано следующим образом: х-А-Ь Таким образом, основной задачей при решении системы линейных уравнений является нахождении инверсии матрицы коэффициентов. Положительно определенные матрицы. Квадратная матрица А размерности (и X и) называется положительно определенной, если для некоторого ненулевого вектора х размерности (и) выполняется условие: хт Ах > 0. Дифференцирование и интегрирование матриц Для матрицы a(i)= Jfl. . it) j дифференцирование н интегрирование определены следующим образом: dt ,(t)= dt \A(t)dt=[\aij{t)dt\. 1.3. Матричная форма записи основных соотношений теории упругости В результате воздействия на тело внешних нагрузок и температуры его точки могут переместиться относительно друг друга в новые положения. В этом случае вектор перемещения для трехмерной задачи можно записать следующим образом: {u}=\ux,Uy,Ugl(1.5) где U ,U ,U (нли соответственно и, v, и>) — проекции вектора перемещений на коор-х у Z динатные оси X, у, Z соответственно. Для двумерной задачи вектор перемещений имеет два компонента: {и}={их,иу\.(1.6) Здесь н далее фигурными скобками { ... } будем обозначать вектор-столбец (для экономии места он будет иногда записываться в строчку). Квадратными скобками [ ... ] будем обозначать квадратные н прямоугольные матрицы. Разность перемещений двух соседних точек вызывает деформации в материале н связанные с ними напряжения. В общем случае, деформации и напряжения в материале конструкции состоят из шести компонентов (рнс. 1.3): 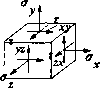 О ,0 ,G ,Х ,Т Л —для напряже-х у z ху yz zxv Рис. 1.3 НИИ и е ,е ,е ,у ,у ,у х у z ху yz zx маций. для дефор- 1.3.1. Плоские (двумерные) задачи Под плоским напряженным состоянием понимают случай: (1.7) Примером этого может служить плоское тонкое кольцо постоянной толщины, находящееся под действием внутреннего давления (рис. 1.4). УУУУ   Рис. 1.4Рис. 1.5 плоской деформации говорят в случае: е2 = гу2=12х=0 К*0)-С»-») Примером может служить длинный цилиндр с постоянной площадью сечения под действием постоянного вдоль оси z внутреннего дааления (рис. 1.S). Возможен вариант, в котором £ = const Ф 0. 1.3.2. Основные соотношения между напряжениями, деформациями и температурой Для упругих изотропных материалов имеем: у 1/е -v/e о -v/e 1/е о о о 1/g
или {е }= [е {<т }+{е ),где Eq —начальные деформации, е гости, V — коэффициент Пуассона, g — модуль сдвига. Заметим, что: е (1.9) — модуль упру- g = 2(l + vY (1.10) Анализ (1.10) показывает, что для однородных изотропных материалов существуют Две независимые константы, описывающие механическое состояние материала Решив систему уравнений (1.9), получим зависимость напряжений от деформаций: Г 7-v 7 v О v 1 О О 0 (l-v)/2 У хО >0 (1.11 или { а }= [ Е ]{е }+ { t7fl J, где { GQ )= — [ Е ]{efl J — начальные напряжения. Приведенные выше формулы справедливы для случая плоского напряженного со стояния. При плоской деформации выражения для постоянных материала в формулах не обходимо заменить на следующие выражения: ЕV Е ->-t.v-»-, G->G.(1.12 1-v2 1-v Например, связь между напряжениями и деформациями для случая плоской деформа кии: Т I *У) Г (7 + v)(7-2v) 1-v v О v 1-v О О 0 [l-2v]J2
(1.11 а Начальные напряжения вследствие изменения температуры определяются по формуле: хО уо \JxyO аАТ) \=\оАТ О (1.13 где О. — коэффициент термического расширения, ЛТ — изменение температуры. Заме тим, что если температурные деформации не стеснены, то при изменении температуры > конструкции не возникают упругие термические напряжения. 1.3.3. Соотношения между деформациями и смещениями Для малых деформаций и смещений имеют место следующие зависимости £ = ди/дх, = bvjby, у = ди/ду + dv/dx, или в матричной форме: или {е }=[/)]{ и}.(1.14
0 1 2 3 4 5 6 ... 87 |












