Раздел: Документация
0 ... 53 54 55 56 57 58 59 ... 96 Говорят, что задан абстрактный автомат, если задано: 1.X ={#,}, г = 1,/72 - входной алфавит; 2.У = {уу}, У = 1,77 - выходной алфавит; 3.Q ={qk), k = \,р - алфавит состояний; 4.F:X х Q ->Q - операция, переводящая декартово произведение F х Q в Q, или F X х Q -> (Q, У); 5.6fr g Q - начальное состояние автомата. Другое задание: 1. X ={Х{}У i =1,772 2.Y={yi},j = u 3.Q={qk),k=\ 4. = f(x,q) - функция переходов. 5.у = \y(x,q) - функция выходов. Перечисленные способы задания являются аналитическими. Они состоят из трех конечных множеств и двух функций, определенных на множествах. Множества X, У, Qявляются не только конечными, но и счетными, эквивалентными натуральному ряду. Поэтому матричное задание автомата состоит в табличном задании функций q = f(x,q), y = \\i(x,q).
Геометрический способ задания автомата сводится к изображению ориентированного графа, вершинами которого являются состояния автомата, обозначаемые различными буквами: q е Q, а около каждого ребра (cjk , qj ставится буква входного алфавита лсг- е X, вызывающая переход автомата из состояния qk в qt, и буква выходного алфавита т/г- е У, которая появляется на выходе автомата. Если автомат первого рода, то выходная буква определяется парой (qk х, а если второго рода, то парой Xj). Начальное состояние автомата обозначается буквой q\ е Q. Таким образом, ориентированный граф, ребра которого нагружены буквами входного и выходного алфавитов, однозначно задает некоторый абстрактный автомат. Графы с нагруженными ребрами (весовыми функциями на ребрах) обычно называют графоидами. Поэтому ориентированный графоид - геометрическая интерпретация абстрактного автомата. Пример способов задания абстрактного автомата. Пусть задан абстрактный автомат (аналитическое задание): А = (X, Y,Q,q = fix, q),y= i/(*f q)), X ={xux2,x3), Y ={yx ,#2h Q={fl.<72.<73.<74} Функции f и \\f удобнее задавать таблично, отсюда табличный способ задания автомата: L
Геометрический способ задания автомата: 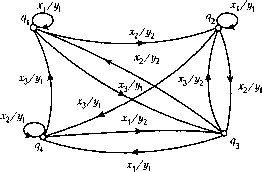 Предположим, что автомат является автоматом первого рода. Подача на вход автомата Д установленного в начальное состояние Ц\ входного слова Р\ = х\Х\х2х3х2х3 вызывает на выходе слово Ц =У\У\У2У2У2У\- Пример описания реального автомата абстрактным. Из цехов А и В идут детали Л и Б в некоторой беспорядочной последовательности ААВАВВААВА... Требуется образовать тройки для последующей сборки (рис.2.29). ААВАВВА... ABA ABA ABA Рис.2.29. Схема сборочного автомата Х={хх = А,х2 =В); Y ={*/! =А*/2 =#>*/3 =°); 0={Я\>Я2>Яъ)- qx - автомат ждет деталь А-Х\\ q2 - автомат А ждет В = х2; <7з - автомат после АВ ждет А=Х\. х2/0х/0 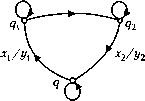 х2/0 Графоид автомата
Матрица переходов и выходов 2.2.7. Непрерывные модели Представление технологической системы (ТС) в виде ориентированного объекта. Рассмотрим, от чего зависит погрешность каждого составляющего звена технологической размерной цепи. Для этого представим ТС в виде ориентированного объекта (рис.2.30). х** - входное положение элемента формы заготовки, относительно технологической базы, свойства материала заготовки. 0 ... 53 54 55 56 57 58 59 ... 96 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












