Раздел: Документация
0 ... 29 30 31 32 33 34 35 ... 87 обеспечивает практически синусоидальную форму токов в ста-торных обмотках. Входными сигналами для преобразователя частоты с автономным инвертором и ШИМ являются задаваемые из системы управления электропривода угол поворота обобщенного вектора, вращающегося с синхронной скоростью в неподвижной системе координат х-у, и требуемое значение напряжения. Микропроцессорная система в реальном времени определяет номер сектора и внутрисекторный угол поворота Q*u, после чего производит расчет точек переключения в соответствии с выбранным алгоритмом. Удобство реализации на микропроцессорном уровне является одним из достоинств векторной ШИМ. 4.4. Преобразователи частоты с автономным инвертором, управляемым током Кроме преобразователей с автономным инвертором напряжения, рассмотренных в предыдущих подразделах, находят широкое распространение преобразователи со звеном постоянного тока и автономным инвертором, управляемым током. Классическая структура преобразователя, называемого преобразователем с автономным инвертором тока (АИТ), показана на рис. 4.10. Принципиальное отличие его от преобразователя с АИН состоит в том, что инвертор получает питание от источника тока, а не от источника напряжения. В качестве такого источника используется управляемый выпрямитель (УВ) с системой управления выпрямителем (СУВ), которому придаются свойства источника тока путем создания контура регулирования выпрямленного тока Id. В контуре регулирования тока предусмотрен регулятор тока (РТ), на входе которого истинное значение выпрямленного тока сравнивается с сигналом задания. Таким образом, этот сигнал задает значение тока на входе автономного инвертора, а следовательно, и значение тока статора двигателя, который формируется из тока Id путем переключения ключей инвертора. Частота статорного тока, так же как частота напряжения в преобразователе с АИН и управляемым выпрямителем (см. рис. 4.1), задается сигналом задания частоты на входе системы управления инвертором (СУИ). Особенности принципа работы преобразователя с АИТ определяют схемные отличия его от преобразователя с инвертором напряжения: сглаживающий фильтр, предназначенный для сглаживания пульсаций выпрямленного тока, в качестве основного элемента содержит не конденсатор, а дроссель L, кроме того, в АИТ отсутствуют диоды обратного тока в ключах автономного 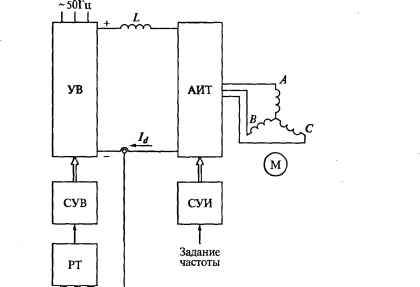 г- Задание тока Рис. 4.10. Структура преобразователя частоты со звеном постоянного тока, управляемым выпрямителем и автономным инвертором тока инвертора. Это связано с тем, что при переключениях ключей инвертора формируются не напряжения на обмотках статора двигателя, а ток в них. Напряжение на обмотках формируется при уже сформированной форме фазного тока, а фазовый сдвиг между током и напряжением образуется путем сдвига напряжения относительно тока, а не тока относительно напряжения. В результате отсутствуют промежутки времени, в течение которых уже произошло переключение ключей инвертора, а ток должен еще протекать в прежнем направлении из-за индуктивного характера нагрузки. Режим частотного управления скоростью асинхронного двигателя при питании его от АИТ называют частотно-токовым управлением [9]. При частотно-токовом управлении обычно обеспечивается управление составляющими тока статора по двум перпендикулярным осям, что дает возможность регулировать момент двигателя и задавать режим работы с желаемым потоком возбуждения. Поэтому рассматриваемые далее преобразователи, управляемые током, Используются во внутренних контурах систем регулирования скорости, внешними по отношению к которым являются контуры регулирования скорости и потока. При изменении сигнала зада- ния на входе замкнутого контура скорости, а также при изменении скорости двигателя в результате изменения нагрузки на двигателе, изменяется сигнал на выходе регулятора скорости, являющийся сигналом задания тока, что приводит к требуемому изменению составляющей тока статора двигателя, формирующей момент двигателя (см. подразд. 6.3). В настоящее время принцип частотно-токового управления с применением преобразователя частоты со звеном постоянного тока обычно реализуется с использованием автономного инвертора напряжения с широтно-импульсной модуляцией, который охватывается обратной связью непосредственно по выходному току, т. е. по току статора двигателя. Таким образом, сигналом задания для преобразователя является сигнал задания тока двигателя, и преобразователь частоты приобретает свойства преобразователя, управляемого током. В работе [60] предлагается рассматривать непрямое и прямое регулирование тока. В первом случае инвертор имеет обычную систему управления с широтно-импульсной модуляцией. В дополнение к ней строятся контуры регулирования токов с обычными, например, пропорционально-интегральными регуляторами тока, которые могут выполняться в неподвижной или во вращающейся системе координат. Во втором случае для формирования тока непосредственно используются ключи инвертора, которые переключаются в функции рассогласования между заданным и истинным значениями тока. Один из вариантов реализации непрямого управления с регуляторами тока, выполненными в неподвижной системе координат, показан на рис. 4.11. В преобразователе частоты используется АИН со своей системой управления. В каждой фазе предусмотрены регуляторы тока VTA, РТВ, РТС, на входах которых сравниваются между собой синусоидальные сигналы задания токов На, Нв> Не и ш истинные значения, представляющие собой мгновенные значения токов в фазах обмотки статора ilA, ilB, /1С. Амплитуда токов задается амплитудой сигналов задания, а частота - их частотой. Входными сигналами для системы управления инвертором служат синусоидальные сигналы щА, щв, щс на выходах регуляторов тока. Такой преобразователь является частью системы регулирования скорости привода. Внешние контуры регулирования с регуляторами скорости и потокосцепления обычно выполняются во вращающейся системе координат. Выходные сигналы регуляторов потокосцепления и скорости задают токи по осям а и Р, которые затем преобразуются в сигналы задания мгновенных значений токов i\A, i\B, /,*с. Принципиально так же работает система с регуляторами тока, выполненными во вращающейся системе координат а-р. Отли- 0 ... 29 30 31 32 33 34 35 ... 87 |












