Раздел: Документация
0 ... 56 57 58 59 60 61 62 ... 143  Рис. 5.32. К пояснению физического смысла введения обратной связи по первой производной. усилителя вычитается из напряжения сигнала ошибки ые (являющегося сигналом управления) системы. Напряжение ые, пропорциональное отклонению 6 управляемой величины Р относительно заданного значения а (рис. 5.32, а), изображено на рис. 5.32, г. Как видно из рис. 5.32, в, г, в начальный промежуток времени (от / = 0 до / = <,), когда осуществляется разгон двигателя до заданной частоты, напряжение сигнала ошибки ые и переменная составляющая первой производной kdfi/dt складываются и двигатель набирает требуемую частоту и отрабатывает ошибку рассогласования по углу быстрее, чем без обратной связи. В промежуток времени, когда сигнал рассогласования 6 уменьшается (например, от момента времени t% до <4), а двигатель имеет большую частоту вращения, чем заданная, с целью предотвращения большого перерегулирования желательно уменьшение напряжения, подаваемого на двигатель. Такое уменьшение обеспечивается переменной составляющей первой производной управляемой величины kdfyldt, так как в рассматриваемом промежутке времени эта составляющая имеет противоположную полярность относительно напряжения сигнала рассогласования. В момент времени f4, когда ошибка по положению 0=0, двигатель, имевший до этого большую частоту вращения, чем заданная, по инерции проходит состояние равновесия. В этот момент времени за счет kd$/dt к двигателю подается напряжение противоположного знака, которое создает тормозящий момент и тем самым уменьшает величину перерегулирования. С момента <4, когда возникает ошибка по положению противоположного знака, переменная составляющая первой производной, складываясь с Uq, обеспечивает наиболее эффективное уменьшение этой ошибки. Таким образом, переменная составляющая первой производной управляемой величины, введенной в систему через обратную связь, аналогично первой производной сигнала рассогласования способствует уменьшению перерегулирования и более быстрому затуханию переходного процесса. Постоянная составляющая первой производной выходной величины системы kd§ldt , пропорциональная установившемуся значению производной, действует как в переходном, так и в установившемся режиме равномерного вращения ведущего вала. Имея противоположную полярность с напряжением сигнала рассогласования, она уменьшает постоянную составляющую (или в установившемся режиме — установившееся значение) напряжения подаваемого на двигатель, и тем самым вызывает увеличение скоростной ошибки системы. Компенсировать уменьшение усиления системы, вызванное этой постоянной составляющей, как и в случае включения последовательного дифференцирующего фазоопережающего контура с затуханием, можно путем соответствующего увеличения коэффициента усиления других элементов системы. Как отмечалось, в рассматриваемой следящей системе для получения напряжения, пропорционального частоте вращения исполнительного двигателя, применяется тахогенератор постоянного тока. Однако у этих тахогенераторов сравнительно высокий момент трения, образуемый за счет давления щеток на коллектор; при маломощных исполнительных двигателях, когда момент трения тахогенератора превышает 5... 10 % номинального момента исполнительного двигателя, применение тахогенератора для коррекции нецелесообразно. Тахогенераторы постоянного тока создают высокочастотные помехи. Поэтому в системах, где имеются усилители переменного тока, целесообразно применять тахогенератор переменного тока. В качестве последнего обычно используется двухфазный асинхронный двигатель, работающий в режиме генератора (рис. 5.33): обмотка возбуждения его питается от сети переменного тока, а с 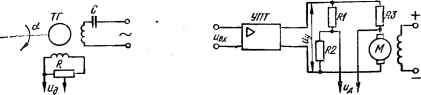 Рис. 5.33. Схема тахо-Рис. 5.34. Схема тахометрнческого моста по- генератора переменного, стоянного тока для выработки напряжения, тока.пропорционального частоте вращения испол- нительного двигателя. обмотки управления снимается напряжение переменного тока частоты сети, огибающая которого пропорциональна частоте вращения ротора. Фаза этого напряжения с изменением направления вращения изменяется на 180°. Чтобы с выхода тахогенератора получить напряжение, совпадающее или находящееся в противофазе с напряжением сети, в цепь обмотки возбуждения включается емкость С, которая создает сдвиг по фазе на 90° между напряжением сети и напряжением на обмотке возбуждения. Тахогенератор переменного тока не создает высокочастотных помех и имеет меньший по сравнению с тахогенератором постоянного тока момент трения. Однако фаза выходного напряжения зависит в некоторой степени от частоты вращения. Недостатком применения тахогенераторов как постоянного, так и переменного тока для коррекции, в особенности маломощных САУ, является то, что тахогенератор, будучи соизмерим по своим габаритным размерам с исполнительным двигателем, существенно увеличивает постоянную времени апериодического звена, которым представляют исполнительный двигатель с учетом момента инерции тахогенератора. Напряжение, пропорциональное первой производной от угла поворота приемного вала, можно получить и без тахогенератора с помощью так называемого тахометрнческого моста. Схема такого моста для получения напряжения постоянного тока, пропорционального частоте вращения л исполнительного двигателя постоянного тока, изображена на рис. 5.34. Мост образуют резисторы Rl, R2, R3 и сопротивление якоря двигателя. Когда двигатель неподвижен, мост уравновешен и напряжение ид, снимаемое с диагонали моста, равно нулю. При вращении двигателя возникает про-тиво-э. д. с, сопротивление двигателя увеличивается, мост разбалансируется. Выходное напряжение моста при соответствующем выборе его параметров пропорционально частоте вращения двигателя. Схема тахометрнческого моста для случая применения в системе двухфазного асинхронного двигателя М переменного тока изображена на рис. 5.35, а. Мост состоит из резисторов Rl, R2, R3, конденсатора С2 и полного сопротивления обмотки управления ОУ двигателя. Выходное напряжение, снимаемое с диагонали моста, пропорционально частоте вращения двигателя. Выходное напряжение моста сдвинуто по фазе относительно выходного напряжения усилителя. Компенсация этого сдвига осуществляется с помощью фазосдвигающей цепочки R4, С4, причем /?4 2> R% + Rs- Если усилитель имеет трансформаторный выход, для получения напряжения, пропорционального частоте вращения двигателя, удобнее применить схему, изображенную на рис. 5.35, б. Недостатком коррекции САУ с помощью охвата обратной связью по первой производной участка системы с интегрирующим звеном, как отмечалось, является уменьшение коэффициента усиления системы, а следовательно, увеличение ее скоростной ошибки. С физической точки зрения это объясняется тем, что выходное напряжение тахогенератора (тахометрнческого моста), которое вычитается из сигнала управления, не равно нулю не только в режиме переходного процесса, но и в установившемся режиме вращения с постоянной частотой (обратная связь действует как в переходном, так и в установившемся режиме). Один из возможных вариантов схемы коррекции с помощью обратной связи по второй производной, охватывающей участок системы с интегрирующим звеном, где 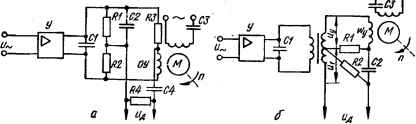 Рис. 5.35. Схемы гахометрических мостов переменного тока. Рис. 36. Пример коррекции следящей системы с помощью обратной связи по второй производной. 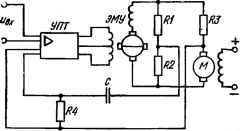 отмеченный недостаток устраняется, изображен на рис. 5.36. Здесь в отличие от схемы рис. 5.31 напряжение ид, пропорциональное первой производной угла поворота приемного вала (выходное напряжение тахометрического моста), поступает не непосредственно на вход усилителя, а через дифференцирующий /?С-контур. Благодаря этому обратная связь оказывает влияние на работу системы только во время переходного процесса. В режиме же установившегося равномерного движения выходное напряжение обратной связи равно нулю. Поэтому обратная связь, улучшая кривую переходного процесса, не увеличивает установившуюся скоростную ошибку системы. Сравнительная оценка коррекции САУ с помощью последовательных и параллельных корректирующих устройств Необходимое изменение динамических свойств САУ может быть осуществлено как включением последовательных корректирующих устройств, так и охватом некоторых звеньев системы местной обратной связью (с помощью параллельных корректирующих устройств). Во многих случаях последовательные корректирующие устройства могут быть осуществлены в виде простых пассивных RC — контуров, реализованы на операционных усилителях или цифровых элементах. В простоте последовательных корректирующих устройств состоит их достоинство. Недостатком последовательной коррекции является то, что эффект коррекции уменьшается в процессе эксплуатации при изменении параметров (коэффициента усиления, постоянных времени) последовательно соединенных элементов системы. Поэтому при последовательной коррекции к стабильности элементов предъявляются обычно повышенные требования. 0 ... 56 57 58 59 60 61 62 ... 143 |












