Раздел: Документация
0 ... 68 69 70 71 72 73 74 ... 143 I jo № —» 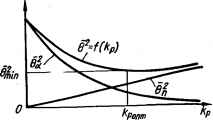 Рис. 7.12. Структурная схема следящей системы. Рис. 7.13. К примеру графического определения оптимального значения АрХ)ПТ. Подставляя значение табличного интеграла 1г (7.51), получаем §2 = a*kp/2. откуда Ь0/2а0а1 = l/2fep в формулу (7.52) Дисперсия суммарной ошибки ё2 - С + щ, = oV(*p+ «> + « V2-Для определения kp опт находим производную по kp и приравниваем ее нулю: = — а2с/(с -f- кр)2 + а2/2 = О, р опт (7.53) Из формулы (7.53) видно, что чем больше удельный вес помехи во входном сигнале системы, тем кр опт имеет меньшее значение, а чем больше удельный вес полезного сигнала о, тем больше кр опт. Для графического определения kD опт в соответствии с формулами (7.50) и (7.52) на рис. 7.13 построены графики 6 = /х (fep) и 6П = /2 (кр)-Из рисунка видно, что с увеличением Ар дисперсия G2 составляющей ошибки, вызываемой задающим воздействием, уменьшается, а дисперсия в2 составляющей ошибки, вызываемой помехой, увеличивается. Физическое объяснение этому явлению было дано раньше. График дисперсии суммарной ошибки в2 = / (кр) получен сложением ординат, упоминаемых выше графиков. Из кривой в2 = / (Ар) находится коэффициент Ар опт, соответствующий ,,п- ГЛЛВА 8 Импульсные системы автоматического управления 8.1. Понятие о дискретных системах, классификация дискретных систем Определение дискретной системы. Наряду с непрерывными системами, рассмотрению которых посвящены предыдущие главы, в технике широко применяются дискретные САУ. Система автоматического управления называется дискретной, если выходная величина какого-либо  \Дискретнчй 1 ва@) мемент Непрерывная часть - t непрерывная часть ЛЮ Рис. 8.1. Функциональная схема дискретной САУ. из ее элементов имеет дискретный характер. Преобразование непрерывных сигналов в дискретные выполняется дискретным элементом. Дискретная САУ схематически может быть изображена в виде соединения дискретного элемента и непрерывной части (рис. 8.1). Дискретный элемент дает на выходе ту или иную последовательность импульсов, которая при прохождении через непрерывную часть за счет ее сглаживающих свойств преобразуется в непрерывный сигнал. Последний, проходя через непрерывную обратную связь, сравнивается с входным сигналом системы в элементе сравнения ЭС и получающийся при этом сигнал ошибки воздействует на дискретный элемент. Дискретный элемент или специально вводится в систему с целью упрощения ее конструкции, улучшения некоторых динамических характеристик, или является необходимым элементом в силу особенностей технических средств (например, радиолокационная станция, использующая импульсный метод радиолокации, является импульсным элементом и входит в состав радиолокационных следящих систем). Классификация дискретных систем в зависимости от вида квантования сигнала. В дискретных системах происходит преобразование дискретной информации. Различают дискретность сигнала по уровню и дискретность по времени. Сигналы, дискретные по уровню, получаются в результате квантования сигнала по уровню, когда непрерывный сигнал заменяется ближайшими к ней фиксированными дискретными значениями хв, xlt хп в произвольные моменты времени (рис. 8.2, а). Квантование по уровню в простейшем случае осуществляется релейным элементом. Выходная величина релейного элемента может принимать конечное число фиксированных уровней, равное обычно двум или трем. Если статическая характеристика релейного элемента имеет вид кривой 1 (рис. 8.2, г), то при входном сигнале, изменяющемся по кривой 2, выходная величина л;вых (кривая 3) будет изменяться дискретно (скачком) всякий раз (в моменты tlt tz, ts, г4), когда входной сигнал проходит через значение х0 срабатывания и отпускания реле — через уровень квантования. Как видно из рисунка, выходная величина в приведенном примере может принимать три (0, хг, xz) фиксированных значения. Примером систем, в которых осуществляется квантование по уровню, могут служить релейные системы автоматического управления. *Bx(t),x,M(t) *ex(t) XtxW.Hbixtf) xb*M ГК Wait) 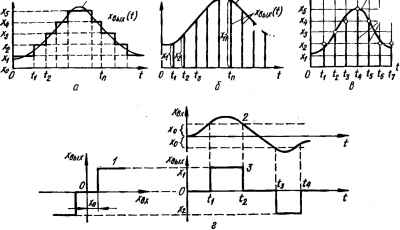 Рис. 8.2. Различные виды квантования сигнала: а — по уровню; б — по времени; в —• по уровню и по времени; г — квантование по уровню с помощью релейного элемента. Сигналы, дискретные по времени, получаются в результате квантования сигнала по времени, т. е. фиксации дискретных моментов времени (tlt tz, tn, рис. 8.2, б), при которых уровни входного сигнала могут принимать произвольные значения (х1г х2, хп соответственно). Квантование по времени осуществляется импульсным элементом и применяется в импульсных системах. Наряду с раздельным квантованием по уровню и времени во многих случаях применяется одновременное квантование по уровню и по времени, когда непрерывный сигнал заменяется дискретными по уровню значениями, ближайшими к значениям непрерывного сигнала в дискретные моменты времени (рис. 8.2, в). Обычно такой дискретный сигнал в результате кодирования преобразуется в цифровой код и применяется в цифровых системах (рис. 8.3). Непрерывное задающее воздействие а (/) с помощью аналогово-цифрового преобразователя (АЦП) AID квантуется по времени, по уровню, кодируется, т. е. преобразуется в цифровую форму а [п]. Управляемая величина с помощью АЦП AID также преобразуется в цифровую форму В0.с [п]. Последовательности чисел а [п\ и В0.с In] сравниваются между собой в ЭС и их разность (сигнал рассогласования) 9 [п] подается на цифровое вычислительное устройство (ЦВУ). Последнее осуществляет функцио- «01 1 Л[П] эс М) Ццву й0.сЫ Рис. 8.3. Функциональная схема цифровой САУ. 0 ... 68 69 70 71 72 73 74 ... 143 |












