Раздел: Документация
0 ... 69 70 71 72 73 74 75 ... 143 нальное преобразование последовательности чисел в соответствии с заложенной программой. Выходной дискретный сигнал ЦВУ преобразуется в непрерывный с помощью цифро-аналогового преобразователя (ЦАП) D/A и воздействует на непрерывную часть НЧ системы. В отличие от рассмотренной системы, содержащей непрерывную часть, имеются чисто дискретные системы, состоящие только из цифровых элементов. Достоинства и недостатки дискретных систем. С выхода дискретного элемента информация о входном сигнале поступает лишь в дискретные моменты времени, что приводит к некоторой потере информации. В цифровых системах процессы преобразования сигналов обычно происходят не в реальном масштабе времени, вследствие чего вносится определенное запаздывание. Эти факторы являются причиной понижения точности дискретных САУ. Однако дискретные системы обладают рядом преимуществ перед непрерывными системами: 1.С помощью одной дискретной САУ (автоматического управляющего устройства) можно осуществлять управление процессами в нескольких управляемых объектах поочередным подключением этих объектов к АУУ или обеспечивать управление многими параметрами одного технологического процесса (объекта). 2.Дискретные элементы обеспечивают более высокую точность преобразования и передачи информации. В цифровых системах имеется возможность реализации сложных алгоритмов управления. Благодаря этому точность дискретных, в частности цифровых, САУ может быть выше точности непрерывных систем. 3.Дискретные системы во многих случаях оказываются проще в конструктивном отношении аналогичных непрерывных систем. 8.2. Определение импульсной системы Виды импульсной модуляции. Классификация импульсных элементов по виду модуляции. Типы импульсных систем Импульсная система содержит импульсный элемент (ИЭ), осуществляющий квантование сигнала по времени, т. е. преобразование непрерывного входного сигнала х (t) в последовательность модулированных импульсов. Поэтому импульсный элемент можно рассматривать как модулятор импульсов, осуществляющий модуляцию какого-либо параметра периодически повторяющихся импульсов по закону изменения входного непрерывного сигнала, называемого модулирующим сигналом. Основными параметрами последовательности импульсов являются амплитуда (высота) импульса А, длительность (ширина) импульса т = уТ, положение импульса аТ внутри периода повторения Т импульсов (временной сдвиг или фаза импульса) и период повторения импульсов Т. В зависимости от того, какой из параметров последовательности импульсов изменяется в соответствии с изменением модулирующего сигнала, различают следующие виды импульсной модуляции: амплитудно-импульсную модуляцию (АИМ), широтно-импульсную модуляцию (ШИМ) и временную импульсную модуляцию (ВИМ). 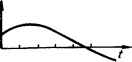 АИМ-I
О Т 27 31 О V 21 31 т Рис. 8.4. Амплитудно-импульсный элемент первого рода. 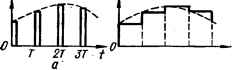 Т 2Т 31 Рис. 8.5. Последовательности импульсов на выходе амплитудно-импульсного элемента первого рода с длительностью импульсов т <Т(а) вт= Т (б). Если модулируемый параметр остается постоянным в течение времени существования импульса, то имеем импульсную модуляцию первого рода — ИМ1, если же он изменяется в соответствии с текущим значением модулирующей функции, то имеем импульсную модуляцию второго рода — ИМИ. Импульсные элементы в зависимости от вида и рода импульсной модуляции подразделяются на амплитудные, широтные и временные импульсные элементы соответственно первого и второго рода. В амплитудном импульсном элементе происходит амплитудно-импульсная модуляция (АИМ). Если на вход амплитудного ИЭ, осуществляющего АИМ1 (рис. 8.4), подать непрерывный сигнал хех (г), то на выходе будем иметь последовательность импульсов постоянной длительности с периодом повторения Т, амплитуда которых пропорциональна значениям модулирующего (входного) сигнала в равноотстоящие дискретные моменты времени (в моменты возникновения импульсов). Частными случаями амплитудного импульсного элемента с АИМ1 являются: а) ИЭ, выходные импульсы которого имеют длительность т = уТ значительно меньшую, чем период повторения Т (т Т) (рис. 8.5, а); б) ИЭ, длительность импульсов которого равна периоду повторения Т импульсов (рис. 8.5, б). Такой импульсный элемент получается в результате «растягивания» (запоминания) кратковременных импульсов на время периода с помощью схемы фиксатора. При АИМП амплитуда импульса изменяется в течение времени существования импульса в соответствии с текущим значением модулирующего сигнала (рис. 8.6). 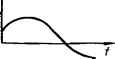 АИМ-й хвыхИУ
Ш\ „ 121ЧЦ t ШИМ-I Xtwttk XSxW 4иэ xn«(t) t о т ггЦ \\л rip к "ЯГТ Рис. 8.7. Широтио-импульсный элемент первого рода. ВИМ-1 о t Рис. 8.8. Временной импульсный элемент первого рода. Полезная информация на выходе амплитудного импульсного элемента выражена огибающей амплитудно-модулированной последовательности импульсов. Для получения этой информации необходимо выделить огибающую последовательности импульсов. В широтном импульсном элементе происходит широтно-импульс-ная модуляция (ШИМ) (рис. 8.7). ИЗ с ШИМ1 формирует последовательность импульсов с периодом повторения Т одинаковой амплитуды, но ширина импульсов т = уТ пропорциональна значениям модулирующего (входного) сигнала хвх (г) в моменты возникновения импульсов. Временной импульсный элемент осуществляет временную импульсную модуляцию. Если на вход временного ИЗ первого рода (ВИМ1) (рис. 8.8) подать непрерывный сигнал х (t), то на выходе будем иметь последовательность импульсов одинаковой амплитуды и ширины, сдвиг которых по времени (по фазе) аТ относительно дискретных моментов времени квантования О, Т, 2Т, пТ соответствует значениям входного сигнала в эти дискретные моменты времени. Временно-модулированную последовательность импульсов можно рассматривать как фазо-модулированную последовательность импульсов. В зависимости от вида и рода (первого и второго рода) импульсного элемента системы автоматического управления подразделяются на три типа: амплитудные импульсные системы (АИС); широтные импульсные системы (ШИС), временные импульсные системы (ВИС). Импульсные САУ получили широкое распространение в технике. Они, например, используются для автоматической регулировки усиления, автоматической подстройки частоты приемников импульсных сигналов, автоматического сопровождения цели по дальности, автоматического сопровождения целей по угловым координатам при работе радиолокационной станции в режиме кругового обзора, автоматического управления движением транспорта на магнитном подвесе и т. д. Параметры импульсного элемента Коэффициент усиления &и импульсного элемента — отношение величины модулируемого параметра выходной последовательности импульсов к величине входного сигнала хвх (t) в соответствующий 0 ... 69 70 71 72 73 74 75 ... 143 |












