Раздел: Документация
0 ... 70 71 72 73 74 75 76 ... 143
Рнс. 8.9. Различные формы импульсов: а — прямоугольная; б — треугольная; « — нснциальиая. синусоидальная: г — эксо-
дискретный момент времени. Например, коэффициент усиления амплитудного импульсного элемента &„ = А/хцХ (где А — амплитуда импульса; л;вх — соответствующее дискретное значение входной величины). Период повторения импульсов Т или частота повторения импульсов со0 = 2л/Т. Длительность импульсов т = уТ (где у — скважность импульсов, показывающая, какую часть периода повторения импульсов занимает длительность импульса) или относительная длительность импульса у — = т/Т. Форма импульса S (г) может быть прямоугольной, треугольной, синусоидальной, экспоненциальной (рис. 8.9) и т. д. Перечисленные параметры импульсного элемента показаны на рис. 8.9. Характеристика импульсного элемента — зависимость величины модулируемого параметра выходной последовательности импульсов от соответствующих дискретных значений входной величины (рис. 8.10). На линейном участке крутизна характеристики импульсного элемента равна коэффициенту усиления импульсного элемента (для малых значений входного сигнала): &„ = А/хвх. Импульсные элементы разнообразны по конструкции (механические, электромеханические, фотоэлектрические, электронные). В качестве импульсного элемента может быть простейший ключ и сложное устройство, например, радиолокационная станция. Наиболее широкое применение на практике получили амплитудные импульсные элементы, осуществляющие амплитудно-импульсную модуляцию первого и второго рода. В дальнейшем рассматриваются импульсные системы с амплитудным импульсным элементом первого рода. В качестве примера импульсной системы рассмотрим систему автоматического сопровождения цели по дальности импульсной радиолокационной станции. Система автоматического сопровождения цели по дальности импульсной радиолокационной станции (PJIC) Функциональная схема системы (рис. 8.11). Задающим воздействием системы является дальность Dx (t) до цели, непрерывно изменяющаяся во времени. Эта дальность измеряется с помощью РЛС. Информация о дальности с выхода приемника импульсной РЛС поступает в дискретные моменты времени с частотой, равной частоте посылок стан- 1---. fi ~ * 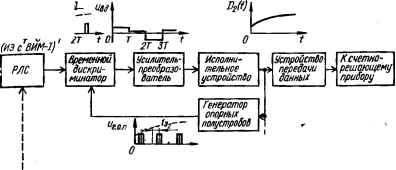 . (ИЭсВИМ-I) T 2T 3t t I Г Генератор ~ I i-------------------1 селекторных*} импульсов J Рис, 8.11. Функциональная схема системы автоматического сопровождения цели по дальности импульсной РЛС. ции. Эта информация содержится во времени запаздывания 4 отраженного сигнала от цели относительно импульса, излучаемого передатчиком. Действительно, дальность Dt (i) до цели пропорциональна времени запаздывания t3: Dx(t) — ctj2 (где с — скорость распространения электромагнитных волн). Если дальность до цели изменяется во времени, например, по кри-. вой Dx (/) (рис. 8.11), то на выходе приемника РЛС появляется последовательность отраженных импульсов (Урле (0- Моменты О, Т, 2Т, ... пТ соответствуют моментам излучения импульса передатчиком. Как видно из рисунка, радиолокатор осуществляет временную импульсную модуляцию: входным сигналом (дальностью до цели) модулируется последовательность импульсов по времени. Поэтому РЛС в этом случае может быть представлена временным импульсным элементом первого рода. Система автоматического сопровождения цели по дальности по дискретным значениям дальности воспроизводит непрерывную функцию изменения дальности до цели. Эта система является импульсной следящей системой, использующей принцип управления по отклонению. В состав системы (рис. 8.11) входят: временной дискриминатор, являющийся элементом сравнения, усилитель-преобразователь, исполнительное устройство, генератор опорных полустробов дальности. Система работает следующим образом. В течение коротких отрезков времени, когда вращающийся луч антенны проходит через направление на цель, происходит облучение цели импульсами электромагнитной энергии, которые отражаются от цели, принимаются, усиливаются, преобразуются радиолокационной станцией и поступают на вход системы автоматического сопровождения цели по дальности. При каждом повороте антенны в период облучения цели на вход системы поступает короткая пачка импульсов. Истинное расстояние до цели Dt (t) пропорционально временному сдвигу (запаздыванию ta) каждого поступающего импульса относительно момента его посылки. С другой стороны, дальность до цели D2 (0 вырабатывается системой. Эта дальность Излучаемый импульс Ж и Отраженный * §, импульс от цели в.§ Опорные г полустровы  X-i Рис. 8.12. Упрощенная принципиальная схема временного дискриминатора (а) и примерные формы его напряжений (б). сравнивается с задающим воздействием Dt (t) и получающееся при этом отклонение D2 (t) от (О (т- е- ошибка) используется для управления исполнительным устройством с тем, чтобы это отклонение уменьшилось. Поскольку информация о дальности Dt (f) на вход системы поступает в виде последовательности импульсов, модулированных по времени, а дальность D2 (/), вырабатываемая системой, является непрерывной величиной, то для удобства сравнения D2 (t) с Dx if) дальность D2 (!) преобразуется также в дискретную величину. Для этой цели предназначен генератор опорных полустробов, который осуществляет временную модуляцию последовательности импульсов дальностью D2 (f). Задержка во времени tSt опорных полустробов £/гоп (рис. 8.11), вырабатываемых генератором, относительно моментов излучения импульсов радиолокационной станцией, пропорциональна дальности до цели D2 (t) в дискретные моменты времени. Таким образом, генератор опорных полустробов является импульсным элементом с ВИМ1. Дальности Dx if) и D2 (t) сравниваются в дискретные моменты времени во временном дискриминаторе сравнением временных положений отраженных от цели импульсов и опорных полустробов. Отклонение ДО (f) дальности D2 (f) от дальности Dx (/) AD (t) = D1(f)~D2(f)c (t3 — = Ш/2, проявляющееся в разности времен запаздывания At отраженного импульса t3 и опорных полустробов 42, At = 2AD(f)/c,(8.1) преобразуется временным дискриминатором в напряжение ошибки. Последнее используется для управления исполнительным устройством, изменяющим D2 (f) таким образом, что отклонение D2 (f) от Dt (t) уменьшается. Упрощенная схема временного дискриминатора и примерные формы напряжений, поясняющие принцип его работы, изображены на рис. 8.12. Временной дискриминатор интегрирует отраженный от цели импульс за время левого С1г а затем за время правого С2 опорного 0 ... 70 71 72 73 74 75 76 ... 143 |












