Раздел: Документация
0 ... 14 15 16 17 18 19 20 ... 87 в которых векторы намагничивающего тока и главного потокосцепления, так же как и остальные векторы, представлены в виде комплексных чисел Im = ima + /тр и Чт = \ута + ij/mp. Для записи электромагнитного момента двигателя можно воспользоваться формулой (2.5): 3 К этому добавляются основное уравнение механики привода и выражение для частоты роторной ЭДС: pa = (M!l-Mc)/J; Юр = Юоэл - А.ю Структурная схема приведена на рис. 2.8. Так же, как в схеме, представленной на рис. 2.2, независимыми входными величинами в модели служат: угловая частота напряжения питания со0эл, проекции вектора напряжения U\ на оси системы координат ща и «1р и момент нагрузки Мс. Выходными координатами являются: скорость двигателя, проекции токов статора, ротора и намагничивающего тока, проекции потокосцепления статора и ротора, главного потокосцепления, а также роторная частота. Блок учета насыщения магнитной системы обозначен на структурной схеме буквой F. В нем на основании текущих значений составляющих вектора главного потокосцепления \/ma и \/тр рассчитывается модуль главного потокосцепления [ч] и по характеристике (1) =/(Ля) определяется значение (Lm) , на которое умножаются проекции вектора намагничивающего тока на оси а и Р вращающейся системы координат. Для того чтобы перейти от модели с учетом насыщения к модели ненасыщенной машины, достаточно заменить в блоке F нелинейную зависимость прямой линией, проходящей на уровне Z,"1. В работе [53] отмечено, что при учете нелинейности характеристики намагничивания каналы преобразования составляющих вектора намагничивающего тока в составляющие вектора главного потокосцепления (или обратно) не автономны: любое изменение одной из составляющих входного вектора ведет к изменению обеих составляющих выходного вектора. Структурная схема при ориентации системы координат по вектору потокосцепления ротора (рис. 2.9) также может быть построена с учетом насыщения магнитной системы. Для этого надо 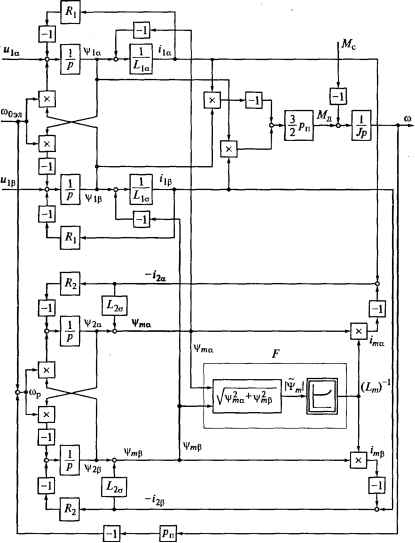 Рис. 2.8. Структурная схема насыщенного асинхронного двигателя при произвольном повороте вращающейся системы координат относительно пространственных векторов воспользоваться системой уравнений (2.29), приняв в ней ц/2р = О, Ц12а = Ч,2И выразив роторную частоту через Ч2 и гр: PVla = "la - JVla - с0оэл\/,р; /п/1р = «ip - «,/ip - (й0эл\у1а; рЧ2 = -R2i2a; о)р = -R2i2p- /ЧУ, la Via °Оэл X Vis Mi la 2a 2a Jla J. P V2 -2a Vma V2 (LmY El V/Vla+Vlp "2p Vwp J2a <2P Ш0э Рис. 2.9. Структурная схема насыщенного асинхронного двигателя при ориентации вращающейся системы координат по вектору потокосцепления ротора 0 ... 14 15 16 17 18 19 20 ... 87 |












