Раздел: Документация
0 ... 17 18 19 20 21 22 23 ... 87 Y/ = Lfif I Mfdhd MfdIf6 Lu /6Lflfb L6Il6 Lid Учитывая соотношения между базовыми значениями величин, получим систему уравнений в относительных единицах, описывающих электромагнитные процессы в синхронном двигателе во вращающейся с синхронной скоростью системе координат (относительные величины обозначены теми же символами, которыми они обозначены в абсолютных единицах, но помечены чертой сверху): PVid = сооэл.б («ы - Ди/ + ЩУ\Ч); PW\g = ю0элб (й,9 - Д/1? -щуи); p4>f=(Uf-Tf)/Tf;(3.7 к/ = (Vid-if)/xd; kq = \qlXq , Jf =4f -{l-of)xJu, гдеш0- относительная частота напряжения на статоре, со0 = = со0эл/со0эл6; Д - активное сопротивление обмотки статора, Д =Rl/Z6; xd - синхронное сопротивление статора по продольной оси, xd = со0элб Ijrf/Zg =Lid/L6; хд - синхронное сопротивление статора по поперечной оси, хд = со0элб Lig/Z6 = Lig/L6; Tf - постоянная времени обмотки возбуждения, 7}= Lj/Rf, су - коэффициент рассеяния в магнитном контуре обмотки возбуждения и обмотки статора по оси d, 07 = 1 - M}fl(LfL\d)[M}fl(LfLxd) - сомножитель, равный (1 - оу)]. При преобразованиях учтено, что сомножитель MdfI/(L6Ii6) = 1. Для определения электромагнитного момента воспользуемся выражением (2.5), заменив в нем индексы а и (3 на d и д: Ма = (3/2)рп (virf/i, ~W\qi\d)- Выбрав базовое значение момента равным М6 = {Ъ/2)р¥хъ1хъ и поделив на него обе части этого выражения, получим выражение для момента в относительных единицах: Основное уравнение механики привода (2.16) при выбранном Л/дби базовом значении угловой скорости шб = щэп.ъ/рп может быть переписано в виде где Ты - механическая постоянная времени привода, Ты = М6/М6. В отличие от асинхронного двигателя, в котором при изменении момента нагрузки на валу изменяется его скорость, в синхронном двигателе изменение нагрузки сопровождается изменением углового положения ротора и связанного с ним пространственного вектора потокосцепления ротора относительно вектора потокосцепления статора при неизменной скорости. В режиме идеального холостого хода векторы потокосцепления ротора и статора совпадают в пространстве. Как показано на рис. 3.2, при наличии нагрузки на валу двигателя вектор потокосцепления ротора отстает от вектора потокосцепления статора на некоторый угол 0, называемый углом нагрузки. Если рассматривать установившийся режим и пренебречь активным сопротивлением обмотки статора, то, как следует из равенства (2.11), а также из равенств (3.1) и (3.2), статорное напряжение представляет собой производную от потокосцепления статора, и, следовательно, вектор напряжения на статоре опережает вектор потокосцепления статора на угол л/2. Изменение нагрузки при постоянном модуле вектора напряже- или в нормированной форме pU> = (MR-Mc)/Tb М ) Рис. 3.2. Пространственная векторная диаграмма синхронного двигателя 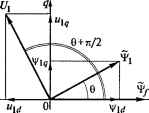 d  Рис. 3.3. Структурная схема электропривода с синхронным двигателем без демпферной обмотки во вращающейся системе координат 0 ... 17 18 19 20 21 22 23 ... 87 |












