Раздел: Документация
0 ... 34 35 36 37 38 39 40 ... 87 Рис. 5.4. Поперечный разрез неявнопо-люсного ротора синхронного двигателя с постоянными магнитами: 1 - пакет ротора; 2 - вал; 3 - постоянные магниты; 4 - отверстия двигателе обмотка статора питается от источника трехфазного напряжения. Корпусной синхронный двигатель имеет конструкцию, близкую к конструкции обычного синхронного двигателя, т. е. имеет корпус с подшипниками, в которых вращается вал ротора. Статор двигателя состоит из шихтованного пакета стали, в пазах которого уложена ста-торная обмотка. Ротор чаще выполнен как неявнополюсный. Внутри корпуса на валу ротора расположен датчик положения ротора, вьтолненный, например, в виде резольвера - вращающегося трансформатора с обмоткой возбуждения на роторе и синусной и косинусной обмотками на статоре. Связь питающейся переменным током роторной обмотки возбуждения с первичной обмоткой, расположенной на статоре, осуществляется через кольцевой трансформатор, благодаря чему резольвер является бесконтактным устройством. Находят применение и другие типы датчиков. Двигатель может быть снабжен встроенным электромагнитным тормозом. Принудительное охлаждение обычно не требуется. Поперечное сечение неявнополюсного ротора с числом пар полюсов рп = 3 показано на рис. 5.4. Пакет ротора 1 набран из листов электротехнической стали и располагается на валу 2 двигателя. Постоянные магниты 3 наклеены на поверхность пакета ротора. Листы стали имеют отверстия 4, в результате наличия которых уменьшается момент инерции ротора и улучшаются условия его охлаждения. Находят применение и двигатели с явнополюсным ротором, в которых постоянные магниты крепятся на валу в продольных пазах. 5.3. Принцип построения и математическое описание электропривода с вентильным двигателем на основе двухфазной синхронной машины Примером электропривода с вентильным двигателем на основе двухфазной синхронной машины с постоянными магнитами 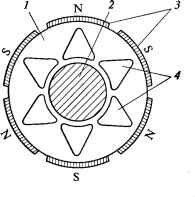 Сеть 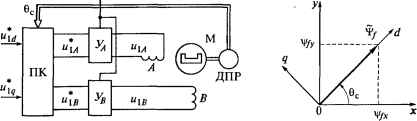 б Рис. 5.5. Вентильный двигатель на основе машины типа ДБМ: а - структура; б - вектор потокосцепления в двух системах координат на роторе является привод с двигателем ДБМ. Структура электропривода с двигателем ДБМ представлена на рис. 5.5, а [29]. На обмотки статора А и В, сдвинутые в пространстве друг относительно друга на угол 90°/рп, т.е. на 90 эл. град., подаются синусоидальные напряжения переменного тока щА и щв. Для образования кругового вращающегося магнитного поля эти напряжения должны быть сдвинуты друг от друга на со0эл/ = 90° во времени. Усилители мощности У и Ув усиливают входные синусоидальные сигналы щА ищв, поступающие с преобразователя координат (ПК). Преобразователь координат преобразует сигналы постоянного тока ud и и* в сигналы переменного тока. Вращающаяся с синхронной скоростью система координат названа системой d-q, как это сделано при рассмотрении синхронного двигателя (см. гл. 3). Вектор потока постоянных магнитов Ф и вектор потокосцепления статора от этого потока Ч f, жестко связанные с ротором, направлены по продольной оси d. Вектор Т/ показан на рис. 5.5, б. Угол 6С, представляющий собой текущее значение угла поворота вращающейся системы координат d-q относительно неподвижной системы координат х-у, является и углом поворота ротора в электрическом пространстве. Он измеряется датчиком положения ротора (ДПР), которым в приводе с двигателем ДБМ служит синус-но-косинусный вращающийся трансформатор. В дальнейшем будем считать, что датчик положения ротора установлен так, что измеряемый им угол 8С равен нулю при совпадении оси d вращающейся системы координат с осью х неподвижной системы координат. Для описания электромагнитных процессов в вентильном двигателе на основе синхронной машины с неявнополюсным ротором воспользуемся выражениями (3.1...3.6) для синхронного двигателя во вращающейся системе координат d-q, учитывая следующее: 1.Уравнения (3.1) и (3.2) справедливы и при рассмотрении двигателя с постоянными магнитами. Входящая в них частота может быть записана в виде со0эл = рпа. 2.Уравнение (3.3), представляющее собой уравнение равновесия напряжений в обмотке возбуждения, не имеет смысла при возбуждении от постоянных магнитов и должно быть исключено. 3.В формуле (3.4) составляющая потокосцепления статора от тока возбуждения Mdfif заменяется на составляющую 4,f = <S>w от потока постоянных магнитов (Ф - полезный поток постоянных магнитов, считающийся постоянным; w - число витков обмотки статора). 4.Вектор потока направлен по оси d вращающейся системы координат d-q. Так же направлен и вектор составляющей потокосцепления статора от потока постоянных магнитов, т. е. Ч = \ifdt Щ = 0. 5.Уравнение (3.6), определяющее ток в обмотке возбуждения, исключается в связи с возбуждением от постоянных магнитов. 6.Рассматриваемая машина выполнена с неявнополюсным ротором, в которой индуктивности статора по продольной и поперечной осям равны друг другу и обозначены Lx = Lu = L\q. Тогда во вращающейся с синхронной скоростью системе координат уравнения, описывающие электромагнитные процессы в вентильном двигателе, приобретают вид: ищ = Rihd + PVid - «оэлУк?; Щд = R\Ug + РЧ\д + «0mVw; Virf = Uhd + Vfdl Эти уравнения можно записать в форме пространственных векторов: Uld q = Rjid-g +p4ld-q +jpn(i)4ld q; - - -(5-1) С учетом того, что 4хf = const и рЧ = dT/ jdt = 0, после подстановки второго равенства в первое получим: Uw-q = Ri [(ТхР +1)+ jpM]ll(l.q + jE,(5.2) 115 0 ... 34 35 36 37 38 39 40 ... 87 |












