Раздел: Документация
0 ... 33 34 35 36 37 38 39 ... 87 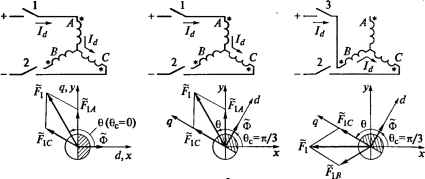 Рис. 5.2. Положение пространственного вектора намагничивающей силы в бесконтактном двигателе постоянного тока: а - при t = б - при t = t2; в - при t = f3 тельно начала и конца обмотки. Начала обмоток отмечены значком*. При вращении двигателя против хода часовой стрелки в момент времени /ь непосредственно следующий за моментом времени /0 (см. рис. 5.1, а), только что замкнулся ключ инвертора 2 вместо разомкнувшегося ключа 6. Ток протекает от начала к концу фазы А и от конца к началу фазы С, что определяет положение векторов Р1А и Flc и результирующего вектора F\ (см. рис. 5.2, а). Ротор, а следовательно, и связанный с ним вектор потока Ф, еще находятся в положении, показанном на рис. 5.1, а. Двигатель развивает электромагнитный момент 3 Ma=-pn\Fi\\<&\smQ, где , ф - модули намагничивающей силы и магнитного потока ротора соответственно; 8 - угол между векторами, равный в данный момент времени 2л/3 рад. Под действием электромагнитного момента ротор двигателя поворачивается против часовой стрелки и угол 8 уменьшается. Когда он уменьшится до значения л/2, момент двигателя достигнет максимума, а при дальнейшем уменьшении утла момент начнет уменьшаться. Когда при Ш=- Ш2 угол 8 станет равным 8С = л/3 рад (см. рис. 5.2, б), момент двигателя уменьшится до значения, существовавшего при Ш = и/[. Если бы состояние ключей инвертора и далее оставалось неизменным, то ротор продолжал бы поворачиваться, стремясь к положению, при котором пространственные ПО векторы Ft и Ф совпадают. Однако при 8 = л/3 рад разомкнётся ключ 1 и замкнется ключ 3, что соответствует Ш = ш3 (см. рис. 5.1). В результате вектор Ft скачком повернется на л/3 рад (см. рис. 5.2, в). Взаимное расположение векторов оказывается при этом таким же, как на рис. 5.2, а, но положение ротора отличается от исходного положения на л/3 рад. Описанный процесс повторяется непрерывно, и двигатель вращается. Момент двигателя и скорость имеют пульсирующий характер. Уровень пульсаций скорости при данном уровне пульсаций момента двигателя зависит от момента инерции привода и проявляется тем больше, чем момент инерции меньше. Так же, как в приводе с асинхронным двигателем, работающим с автономным инвертором тока, в приводе с описанным двигателем необходимо наличие замкнутого контура регулирования скорости. Тогда изменение, например увеличение сигнала задания скорости, приводит к увеличению значения тока Id и намагничивающей силы Ft. Момент двигателя увеличивается, что, в свою очередь, вызывает увеличение скорости. Если момент нагрузки при этом остается неизменным, то по окончании переходного процесса ток Id, а следовательно, и момент двигателя вернутся к прежнему значению. Наличие существенных пульсаций момента и связанная с этим неравномерность вращения двигателя является одним из основных недостатков рассмотренного принципа построения привода. Этот недостаток устраняется переходом к синусоидальной форме тока в обмотках статора. Частота этого тока, так же как и в рассмотренной схеме, должна определяться датчиком положения ротора. 5.2. Конструктивные особенности синхронных двигателей с постоянными магнитами Современные вентильные двигатели выполняются на базе синхронных машин с возбуждением от расположенных на роторе постоянных магнитов. Магниты изготовляются из редкоземельных элементов (например, неодим-железо-бор) и обладают высокой коэрцитивной силой. Наряду с главным достоинством двигателей с постоянными магнитами - отсутствием щеточного контакта, применение постоянных магнитов обеспечивает и ряд их Других положительных качеств. Они обладают малым моментом инерции ротора, простой системой охлаждения, так как на роторе нет нагреваемых током нагрузки обмоток, и лучшим КПД из-за отсутствия потерь на возбуждение. В сочетании с высокой статической точностью и большим возможным диапазоном регули- рования скорости эти свойства могут оказаться решающими аргументами при выборе привода с вентильным двигателем, несмотря на более высокую, чем у привода с асинхронным двигателем, стоимость. Синхронные машины, на основе которых создаются вентильные двигатели, выпускаются многими отечественными и зарубежными электротехническими фирмами. По конструктивному исполнению их можно разделить на бескорпусные двигатели встраиваемого исполнения, которые вписываются в конструкцию исполнительного органа рабочей машины, и корпусные двигатели, конструкция которых близка к конструкции электрических машин общего применения. Примером первого типа исполнения могут служить двигатели типа ДБМ (двигатель бесконтактный моментный). Такой двигатель показан на рис. 5.3. Он состоит из кольцевого статора 1, на котором располагается статорная обмотка, имеющего центральное отверстие для размещения ротора с постоянными магнитами 2. Ротор может крепиться непосредственно на валу исполнительного органа рабочей машины. Статор устанавливается на неподвижной части рабочей машины и закрепляется болтами через крепежные отверстия 3. В качестве датчиков положения ротора применяются синусно-косинусные вращающиеся трансформаторы, специально разработанные для ряда типоразмеров двигателя и конструктивно выполненные так же, как двигатель. На статоре двигателя располагается обычно двухфазная (реже трехфазная) обмотка с числом пар полюсов, равным числу пар полюсов ротора. Вращающееся магнитное поле в двигателе с двухфазной обмоткой создается при питании обмотки двумя напряжениями, сдвинутыми друг относительно друга на 90 эл. град. В трехфазном 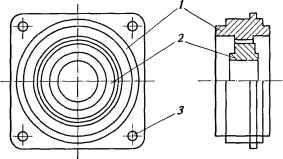 Рис. 5.3. Синхронный двигатель с постоянными магнитами в бескорпусном исполнении: 1 - кольцевой статор; 2 - ротор с постоянными магнитами; 3 - крепежное отверстие 0 ... 33 34 35 36 37 38 39 ... 87 |












