Раздел: Документация
0 ... 99 100 101 102 103 104 105 ... 143 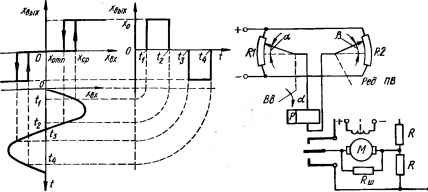 Рис. 10.2 К объяснению действия релейного элемента. Рис. 10.3. Принципиальная схема простейшей релейной следящей системы. полного напряжения даже при малых углах рассогласования, в релейной системе обеспечивается быстрое уменьшение угла рассогласования (обеспечивается большое быстродействие). По мере уменьшения угла рассогласования ползунок потенциометра R2 приближается к эквипотенциальной точке, ток через обмотку реле уменьшается. Когда значение этого тока становится равным току отпускания, реле отпускает и отключает питание от двигателя. Однако в силу инерционности ротор двигателя, имея в момент выключения номинальную скорость, продолжает вращаться еще некоторое время, перемещая движок потенциометра R2 в прежнем направлении. Если при этом движок остановится в пределах зоны нечувствительности системы, то отработка заданного угла на этом заканчивается. Если же движок выйдет за границу зоны нечувствительности, то через обмотку реле ток обратного направления достигает значения тока срабатывания, реле срабатывает и к двигателю подключается напряжение противоположной полярности. Процесс повторяется в обратном направлении. Как видим, в релейной системе имеется возможность появления незатухающих колебаний. Для устранения или уменьшения амплитуды незатухающих колебаний в рассматриваемой системе служит резистор При выключении питания двигателя последний переходит в режим генератора: резистор будучи нагрузкой этого генератора, создает динамическое торможение ротора, чем способствует более быстрой его остановке. Если демпфирование колебаний эффективно (силы торможения велики), то колебания затухнут и движок потенциометра R2 займет положение в пределах угловой погрешности, соответствующей зоне нечувствительности. В случае малых сил торможения колебания, уменьшившись до некоторой величины, сохраняются, т. е. приемный вал, повернувшись на заданный угол, не остановится, а будет совершать колебания около нового положения с постоянной амплитудой и частотой. Управляемой величиной системы в этом случае будет среднее положение приемного вала. Амплитуда колебаний приемного вала ПВ может быть существенно уменьшена и колебания сделаны незаметными выбором большого передаточного числа редуктора Ред. Релейная система, работающая в режиме колебаний с малой амплитудой, может быть сделана более точной, чем система без колебаний, так как благодаря автоколебаниям самое незначительное перемещение командного вала вызовет соответствующее перемещение среднего положения приемного вала, в то время как у системы без автоколебаний отработка возможна только после того, как угол рассогласования превысит значение зоны нечувствительности. Автоколебания как бы делают связь между входным и средним значениями выходной величины системы пропорциональной, т. е. линеаризуют систему. Рассмотрение релейной системы позволяет сделать выводы о некоторых достоинствах и недостатках, а также об особенностях релейных систем. Достоинства релейных систем состоят в том, что вместо сложных усилителей применяются сравнительно простые элементы-реле, обладающие большими коэффициентами усиления, и что релейные системы обладают высоким быстродействием: даже при малом рассогласовании, лишь незначительно превышающем зону нечувствительности системы, к двигателю подключается полное напряжение источника и он уменьшает рассогласование с большой скоростью. В линейных же системах скорость вращения двигателя пропорциональна рассогласованию системы и при малых рассогласованиях отработка задания происходит медленнее. К недостаткам релейных систем относится то, что при повышении точности системы за счет увеличения коэффициента усиления системы и уменьшения зоны нечувствительности реле возможно появление автоколебаний системы, что отрицательно сказывается на иеханической части системы и для многих систем недопустимо. При автоколебаниях, как и при вибрационной линеаризации (см. п. 10.8), достигается пропорциональное управление среднего значения управляемой величины системы. Поэтому в тех случаях, где автоколебания допустимы, стремятся уменьшить их амплитуду, чтобы[ использовать эти автоколебания для линеаризации нелинейности. 10.3. Свойства и методы исследования нелинейных систем Свойства нелинейных систем Параметры систем, содержащих нелинейные элементы, зависш- от входных величин этих элементов. Поэтому к нелинейным системам неприменим принцип суперпозиции: реакция нелинейной системы не равна сумме реакций на отдельные воздействия. Если, например, имеется нелинейная квадратичная зависимость хш% = хвх, то при л;вх = х1 + + *2» Явых = (*i + х2)2, что не равно сумме xBblxi = х\ и л;вых2 = х\. К нелинейным системам неприменимо свойство коммутативности. т. е. в системе нельзя менять местами между собой нелинейные элементы, а также нелинейные и линейные элементы. Для исследования нелинейных систем нельзя применять преобразования Лапласа и Фурье и полученные на их основе передаточные функции, так как эти преобразования являются линейными. Анализ работы релейной системы (рис. 10.3) показывает, что особенностью нелинейных систем является возможность возникновения автоколебаний. Устойчивость нелинейных сиетем определяется не только их структурой и параметрами (как в линейных системах), но и зависит от начальных отклонений относительно состояния равновесия (см. рис. 3.1, в). Это свойство объясняется тем, что параметры системы, определяющие устойчивость, зависят от воздействий. Me.лды исследования нелинейных систем ли система содержит несущественные нелинейности (см., например, рис. 1.18, б), то прибегают к линеаризации по методу касательных (гл. 1, п. 1.4) или по методу наименьших квадратов. Благодаря этому получают линеаризованную систему, которая исследуется с помощью методов, разработанных для линейных систем. Однако в тех случаях, когда требуется высокая точность исследования, возникает задача анализа влияния нелинейностей на процессы в линеаризованных системах. Можно указать еще две задачи исследования нелинейных систем: —анализ устойчивости существенно нелинейных систем, выявление автоколебаний и определение их амплитуды и частоты, определение точности системы и ее реакции на внешние воздействия; —коррекция САУ с помощью нелинейных корректирующих устройств и синтез существенно нелинейных систем, обладающих заданными (желательными) динамическими характеристиками. Для исследования нелинейных систем непригодны методы, разработанные для линейных систем. Для их исследования разработан ряд методов. Наиболее общим методом анализа и синтеза нелинейных систем является второй (прямой) метод Ляпунова. Однако для инженерной практики он представляется достаточно сложным. К методам исследования нелинейных систем, получивших практическое применение, относятся следующие методы. Частотные методы, в частности, частотный метод исследования устойчивости В. М. Попова и метод гармонической линеаризации Л. С. Гольдфарба и. Е. П. Попова. Эти методы представляют собой реализацию частотных методов в нелинейных системах. Метод фазовой плоскости (фазовых траекторий). Этот метод основывается на представлении движения системы на фазовой плоскости. Позволяет сравнительно просто исследовать динамику нелинейных систем второго порядка. Метод припасовывания и его обобщение, метод точечных преобразований А. А. Андронова. Метод припасовывания состоит в том, что нелинейная характеристика заменяется несколькими линейными участ- 0 ... 99 100 101 102 103 104 105 ... 143 |












