Раздел: Документация
0 ... 40 41 42 43 44 45 46 ... 143 ГЛАВА 5 Коррекция систем автоматического управления 5.1. Необходимость коррекции САУ. Понятие о коррекции Противоречие между условиями повышения точности системы в установившемся и переходном режимах. Необходимость и пути коррекции САУ В системах автоматического управления, состоящих только из функционально необходимых элементов, служащих для реализации того или иного принципа управления, хотя и уменьшаются ошибки по сравнению со случаем отсутствия автоматического управляющего устройства, обычно не удается получить требуемых показателей качества. Для замкнутых систем это объясняется тем, что условия достижения высокой точности в установившемся и переходном режимах носят противоречивый характер. Действительно, в этих системах для уменьшения ошибки в установившемся динамическом режиме необходимо повышать коэффициент усиления системы в разомкнутом состоянии kp. Это, например, видно из выражения (2.75) для скоростной ошибки 0«уст (t) следящей системы с астатизмом 1-го порядка бауст (0 = tV&p. гДе ai — скорость изменения задающего воздействия. С увеличением кр, как видно из рис. 3.13, уменьшается запас устойчивости системы, а следовательно, ухудшается переходный процесс. Возможно и так, что система станет раньше неустойчивой, чем удастся получить требуемый коэффициент усиления kp. Пусть, например, комплексная передаточная функция следящей системы в разомкнутом состоянии имеет вид Яр (/со) = Vr/«> № + 1) (ТУю + 1)].< 1. (5.1) Построим ЛАЧХ и ЛФЧХ системы, у которой минимально допустимый запас устойчивости по фазе у = ух (следовательно, еще удовлетворительный переходный процесс), и из ЛАЧХ определим максимально возможный коэффициент усиления системы kp, при котором еще обеспечивается этот запас устойчивости. Чтобы построить ЛАЧХ системы с запасом устойчивости по фазе у1г сначала необходимо найти частоту среза сос, при которой обеспечивается этот запас. Частота среза сос может быть найдена несколькими способами: графически, с помощью предварительно построенной ЛФЧХ (рис. 5.1) как частота в точке пересечения ЛФЧХ с прямой, параллельной оси абсцисс, проведенной на уровне заданного запаса устойчивости по фазе у = у,; из выражения для запаса устойчивости системы по фазе у = 180° — ф (сов) = 180° — 90° — arctg сос7\ — arctg со0Г2; (5.2) Рис. 5.1. Построение ЛАЧХ системы с необходимым запасом устойчивости т>1- Рис. 5.2. Графики зависимости запаса устойчивости по фазе у от отношения постоянных времени V= TjT\ для системы с передаточной функцией Кр (/со) = У/со (Г,/со+ 1)(Г2/со+ 1). 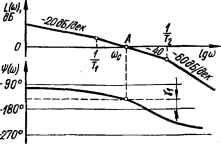 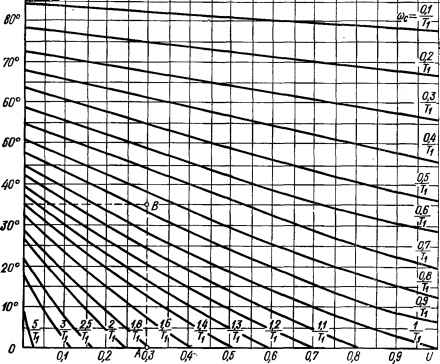 с помощью графиков зависимости у — f (V) (где V = TJTU в общем случае V — отношение меньшей постоянной времени к большей), построенных в соответствии с формулой (5.2) для различных значений частоты среза сос (рис. 5.2). Для определения сос на оси абсцисс отмечается точка, соответствующая значению отношения V (например, при V = 0,3 точка А); эта точка сносится по вертикали до уровня заданного запаса устойчивости Y = Yi (ПРИ Yi = 35° в точку В). Частота сос определяется интерполяцией между значениями частот среза, соответствующих кривым, проходящим выше и ниже точки В (со0 = 0,85/Tj). 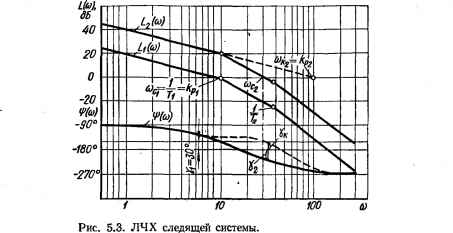 Найдем максимально возможные значения частоты среза со, и коэффициента усиления kp системы, описываемой передаточной функцией вида (5.1), при которых обеспечивается минимально допустимый запас устойчивости по фазе yv Пусть, например, V = 0,27, а уг — = 30°. В соответствии с рис. 5.2 значение запаса устойчивости уг = = 30° для V = 0,27 обеспечивается при частоте среза сос = 1 /Тг. ЛАЧХ системы с найденной частотой среза построена на рис. 5.3. Из рисунка видно, что максимально возможное значение коэффициента усиления, при котором обеспечивается уг = 30°, равно kpi = = 1/Тх, т. е. оно ограничено и обычно является недостаточным. Поэтому в системе возникает большая динамическая, в частности, скоростная ошибка 0аУст (0 = ai/kp. Пусть для уменьшения динамической ошибки системы в примере рис. 5.3 необходимо увеличить kp от значения kpl — 1/Т, до kp2. ЛАЧХ La (со), соответствующая этому коэффициенту, располагается выше, чем Lx (со). Как видно из ЛЧХ, система при 4р2 стала неустойчивой (yz<i0). Чтобы при увеличении fcp сохранить устойчивость, т. е. стабилизировать систему и улучшить показатели качества переходного процесса, необходимо соответствующим образом изменить частотные характеристики системы — осуществить коррекцию системы. Под коррекцией САУ понимается изменение их динамических, свойств (характеристик) с целью обеспечения требуемого запаса устойчивости, повышения динамической точности и показателей качества переходного процесса. Коррекция осуществляется включением в систему дополнительных элементов — корректирующих устройств. Выясним, в каком направлении корректирующие устройства должны изменить частотные характеристики, чтобы стабилизировать систему и повысить ее показатели качества. Как видно из рис. 5.3, с увеличением коэффициента усиления системы kp увеличивается частота среза со0 системы (сос2 > сос). Большим значениям сос будут соответствовать меньшие или даже отрицательные значения запаса устойчивости 0 ... 40 41 42 43 44 45 46 ... 143 |












