Раздел: Документация
0 ... 147 148 149 150 151 152 153 ... 177 Рассмотрим теперь движение ракеты, когда ее началыгля скорость не направлена на планету. Когда начальная скорость ракеты не направлена на планету, траектория полета искривляется щигтяжением. Еслн скорость ракеты не превышает некоторой величины, то по закону Кеплера траектория будет представлять собой эллипс, который лежит в плоскости, проведенной через начальное налравление скорости и центр планеты. Центр же притяжения будет находиться в одном из фокусов эллипса. Разумеется, чем больше начальная скорость, тем больше будет ось орбиты, В случае слишком большой скорости ракета сможет уйти от центра притяжения. Согласно закону Келлера, она также будет двигаться по одному нз конических сечений — параболе или гиперболе. Решение ищется аналогичным образом (рис. 14,16). Изменим лишь составляющие начальной скорости. Vx:=l Vy:=2 Vz:=3 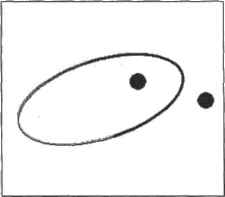 Рис. 14.16. Траектория движении ракеты в пале тяготения одной планеты при ненулевой начальной скорости, направленной не к центру планеты Перейдем к более сложному случаю, когда ракета, имеющая кулевую начальную скорость, движется в поле травитзционных сил двух планет. Особенностью такого движения является то, что траектория ракеты всегда будет находиться в одной плоскости с центрами тяжести планет независимо от их массы и расположения. Изменим входные условия дли масс и координат. Остальные выражения останутся неизменными. М:=,
Решение системы (рис. 14.17) полностью подтверждает сказанное выше. И, наконец, рассмотрим последний случай, иллюстрирующий путь ракеты с ненулевой начальной скоростью в поле сил притяжения пяти планет. 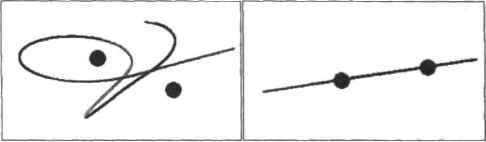 C*.y..Cn«uSp4c<F,0jrj0.30CO)(K.y,x).Q.<A*Sp«<P.0.HTJ,20rj0) Рис. 14.17, Движение ракеты с нулевой качельной скорость*} в поле сил гравитации двух планет Введем массы и координаты планет, а также начальную скорость ракеты. В маркере функции Odesolve укажем конечную точку интегрирования 2500. Остальные параметры и уравнения оставим без изменения.
Vx:= 1 Vy :=2
Траектория ракеты будет представлять собой сложную кривую (рис. М.18). 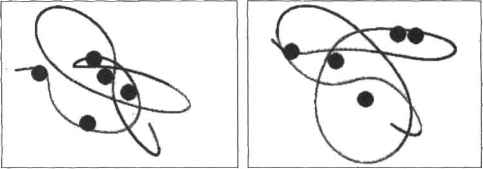 (x,y,$,CiesteSp»ce(F ,0.2300.2000)(х, у, ,Cre*t«Spiu:«(P ,0,2500,100) Рис. 14. IS. Путь ракеты в поле сил притяжения пяти планет (начальная скорость не равна нулю) Заканчивая разговор о решении систем ОДУ в Mathcad, хотелось бы посоветовать: относитесь к результатам работы встроенных функций и вычислительного блока критично и осторожно. Всегда старайтесь искать решение с помощью двух различных алгоритмов и принимайте результат как истинный, только если их ответы совпадут. Параметры встроенных функций настраивайте так, чтобы их изменение в 2-10 раз не приводи- ло к изменению в ответе. Руководствуясь описанным подходом, вы сможете избежать многих неприятных сюрпризов. В следующем разделе мы подробно разберем численные методы, лежащие в основе работы описанных выше встроенных функций. 14.2.4. Численные методы, применяемые встроенными функциями для решения ОДУ и их систем Методы Рунге-Кутта Метод Рунге-Кутта 4-го порядка наиболее популярен при решении задачи Коши, поскольку является достаточно точным н не требует вычисления производных высших порядков, в отличие, например, от метода Тейлора, что значительно сокращает время расчетов. Чтобы понять, каким образом функция rkfixed, реализующая метод, находит численное решение, и насколько оно оказывается верным, попытаемся проанализировать сам алгоритм. Очевидно, самый лучший способ сделать это — самостоятельно написать соответствующую программу. Рассмотрим уравнение y*(t) t-v-y, для которого имеется аналитическое решен не, чтобы сравнить, насколько близки к истинным значения, полученные численным методом. Зададим начальные условия y(t(p)-yO и интервал поиска ftt ,1, который разобьем на множество подынтервалов L.J- Их количество определяется величиной выбранного шага h. Именно на этих промежутках мы будем вести поиск интегральной кривой, описывающей функцию решения. Сущность его заключается в нахождении семейства тангенсов угла наклона кривой на данном промежутке, которое затем используется Для приближенного расчета приращения функции. Сначала определим направление движения на заданном подынтервале. Для этого необходимо найти наклон интегральной кривой в точке t.. Очевидно, что он будет ранен тангенсу угла наклона касательной к нашей кривой в этой точке: kl=tgo: = f,y,) Затем, двигаясь по касательной, сделаем половинный шаги попадем в точку с абсциссой t +Ь/2. Понятно, что прирашеппе искомой функции составит h/2-kl. Теперь определим наклон кривой в новой точке и вновь сделаем половинный шаг из исходной точки, правда, в направлении, заданном к 2 Абсцисса останется той же, а ордината примет вид y(«-h/2k2. Повторим уже знакомую нам операцию: найдем тангенс угла наклона касательной к функции в зтой точке: который используем для определении наклона функции на правой границе интервала разбиения: k4 = f(t. + h.y. + h - k3) Итак, мы получили семейство тангенсов угла наклона кривой в трех точках интервала: kl — в начальной точке, Ь.2 и кЗ — в середине it М - в конце. Эти значепия необходимы для того, чтобы провести численное интегрирование функции, задающей наклон 0 ... 147 148 149 150 151 152 153 ... 177 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












