Раздел: Документация
0 ... 15 16 17 18 19 20 21 ... 49 Sn 823 833 Тг #43 -* ТТ 1 J П Л dt "MP MP 4)2 03 J T ufa) dt kaJ LRT3 1 1 Рис. 5.6. Структурная схема синтезированного наблюдающего устройства Переменные, недоступные измерению: ток якорной цепи wy - /; момент нагрузки w2 = Мс« const. Запишем исходные уравнения объекта наблюдения: (Т„р + 1)еп = кукииу; Jpa = -j-i - Мс; еп = u + iRn; (Тэр + l)iR = еп - - со; рМс = 0, где Rn - внутреннее сопротивление преобразователя. Преобразуя исходные уравнения к форме Коши относительно переменных и, со, i, Мс, получаем: du1 , - = anu + an(u + ani + blluy\ da ~dt a2ii + a2AMc; di dt anu + a32u + a33r, dMc dt Здесь a,, = RT kyk„ «23 = 1 An = - 1 R, RT3ka kaJ> 24 J, «31 1 RT 32 ; «зз = - где /?д - сопротивление якоря двигателя. Составляем матрицы РНУ согласно уравнениям (5.36), (5.39): матрица объекта наблюдения
матрица регулятора 12 122 матрица переменных, недоступных измерению, 122 LA12 =
Al«31 Al«32 /21«31 21«32. «зз - Al«31 -l2la3l 4l«32 матрица переменных, доступных измерению, Mv = А2Х -LAU =
Ai«n /21«ц A«12 21«12. -21«11 матрица управляющего входа MB = B2- LB{ -hAi характеристическая матрица РНУ ~p-a3i+lna3l D = pl-(A22-LA]2) 21«31 Al«32 p + l2ian Данной матрице соответствует характеристический полином РНУ: Dip) =Р2 + (/ll«3I + 4l«32 - <*33)Р- 4l«32«33 = 0. Для выполнения синтеза регулятора РНУ, т. е. определения коэффициентов матрицы L, выбирается стандартное уравнение вто- рого порядка с желаемыми уровнем демпфирования ажел и быстродействием ?ппжел АкелОО = Р2 + С{ЩР + СОб = 0. Выбирая для РНУ модульный оптимум по условию максимального быстродействия, согласно табл. 5.1 получаем: ажел = 4,5 %; тИЛ1 = 2,8; с, = V2; 2,8 0,013 * 215 с- Значение ?ппжел(0,013 с) принято на порядок меньше значения времени переходного процесса объекта наблюдения tnn (0,126 с). Приравниваем коэффициенты при равных степенях р уравнений для D{p) и 1>Жел(р) и с учетом заданных и рассчитанных числовых значений определяем параметры регулятора РНУ: 1 /21 = 2 Л СОЙ 1 С[СОб + я33 + -- = 90,8; СОб -13,3; я32я33 hi = hi = 0- С учетом составленных матриц согласно (5.39) и (5.41) получаем матричные уравнения РНУ: ОЗЗ-4131 /n°32
«3i -Ai«n an " h\a\i ~h\a\i
Решая матричные уравнения относительно переменных £2, /, Мс, получаем результирующие расчетные уравнения синтезированного РНУ: Z\(t) = (а33 -/,,а3,)/-/,,а32Мс+(я3! -1иаи)и + (я32 -/пя12)со-/„6; /= г]+/цм; г2(0 = -k\ani ~ h\ObiMс -l2iciuu-l21ana-l2lbnuy; Мс = Z2+ /2]С0. Приведенным уравнениям соответствует структурная схема РНУ, показанная на рис. 5.7. Требуемые для MP переменные состояния ~ и ~ определяются по формулам "тг а31 llall °32 llfl12 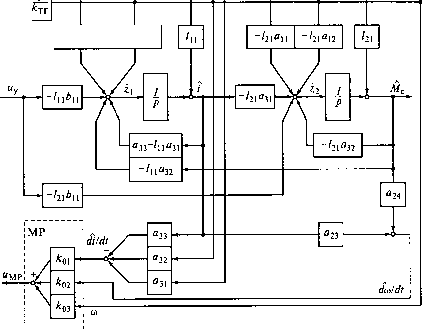 Рис. 5.7. Структурная схема синтезированного редуцированного наблюдающего устройства di - = я31ы + я32со + а33/; - = а2Ъ1 + а2АМс, в которых используются оцененные РНУ переменные / и Мс. 5.2. Узлы токоограничения в системах управления скоростью электропривода Недостатком системы модального управления является отсутствие ограничения координат при больших изменениях входных воздействий. Действительно, свойство линейной системы таково, что отработка разных по величине воздействий осуществляется за одно и то же время переходного процесса. Следовательно, при увеличении, например, задающего сигнала по скорости возрастают одновременно ускорение и ток, значения которых могут оказаться недопустимыми. Таким образом, благоприятные динамические свойства «в малом», полученные с помощью модального регулятора, теряются «в большом». Устранить перегрузки по току и ускорению, возникающие при отработке больших задающих воздействий, можно путем ограничения темпа изменения входного сигнала с помощью специального формирующего устройства - задатчика интенсивности. Однако при этом сохраняется возможность возникновения недопустимых перегрузок по току и моменту при приложении к валу двигателя больших моментов нагрузки. Улучшить свойства электропривода с суммирующим усилителем при больших изменениях входных воздействий можно с помощью нелинейных обратных связей - отсечек. Нелинейность в обратной связи позволяет оставлять действие связи на том интервале изменения контролируемой величины, где это действие желательно, и исключать его там, где оно ухудшает качество системы. Например, по условию стабилизации скорости в зоне рабочих нагрузок нежелательна отрицательная связь по току, напротив, в зоне больших нагрузок целесообразна весьма сильная токовая связь для ограничения токов и моментов в режимах стопо-рения, пуска, торможения. Задачу исключения токовой связи в зоне рабочих нагрузок и введения сильного токоограничения в зоне больших нагрузок выполняет так называемая токовая отсечка. Схема узла токовой отсечки приведена на рис. 5.8. Характеристика обратной связи по току (рис. 5.9, а) имеет зону нечувствительности, создаваемую стабилитронами с напряжением мст(см. рис. 5.8). Характеристика двигателя с узлом токовой осечки (рис. 5.9, б) кроме рабочего участка 1 содержит участок токоограничения 2, Напряжение токовой связи иОТ на входе суммирующего усилителя определяется различно для разных участков изменения тока: wo.t = мдт ~ иотс = о.т-я ~~ wotc = о.т (Л -отс) Для \h \ - 1А>тс1 и ыот= О для /я < /отс. Здесь кот - передаточный коэффициент датчика тока, Ом; /отс - ток отсечки, А, /отс = иотс/кол. It дт "з.т а УП Рис. 5.8. Схема узла токовой отсечки: ДТ - датчик тока; У - суммирующий усилитель; УП - управляемый преобразователь 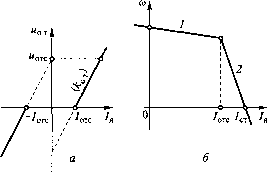 Рис. 5.9. Характеристики токовой отсечки (а) и электропривода с токовой отсечкой (б) Найдем коэффициент усиления по замкнутому контуру тока и коэффициент обратной связи при заданных значениях токов отсечки /отс и стопорения 1СТ. Для режима стопорения можно записать: со = 0; 1Я = /ст/ Еп = 1стКя= кукп[ихт - кот(1сг - /отс)], где Еп - ЭДС управляемого преобразователя, В; изт - задающее напряжение, определяющее уровень тока, В. Тогда коэффициент усиления по контуру тока к - к к от - к 1-1 "-о.т КЗ 1 с (5.42) где /кз - расчетный ток КЗ якорной цепи, А, при линейных ха- рактеристиках У и УП, /кз = кукп и. Введя обозначение котс = для коэффициента отсечки: у"П R /отс ст, получим из (5.42) выражение к - 1 - 1м (5.43) Из (5.43) следует, что отсечка обеспечивает статическое регулирование тока со статизмом ст ~ отс - \ к - 1 (Ijil. 1 \ СТТ СТ который стремится к нулю, когда к -> со. Недостатком токовой отсечки в электроприводах с тиристор-ным преобразователем является возможность превышения мгновенным током стопорного значения в начале процесса пуска. Действительно, за счет нечувствительности тиристорного преобразователя к изменению управляющего сигнала на интервале прово- 0 ... 15 16 17 18 19 20 21 ... 49 |












