Раздел: Документация
0 ... 18 19 20 21 22 23 24 ... 49
f Рис. 5.19. Переходные функции тока, ЭДС преобразователя и двигателя при скачке задания на входе контура регулирования тока Т1 »з 3 его интегральная составляющая , 1Т- обусловливает кт21 пКт*пР линейное нарастание ЭДС преобразователя еп и, следовательно, линейное нарастание ЭДС двигателя ед (рис. 5.19). При достижении предельного значения е„ = Еп тахток начинает снижаться, стремясь к нулю при отсутствии момента нагрузки. В установившихся режимах при М = Мс и I = 1с интегральная составляющая ПИ- регулятора обеспечивает постоянное значение тока / = /3 = . Ко.т При этом электромеханическая характеристика двигателя представляет собой вертикальную прямую в диапазоне скоростей, определяемом значениями ±Enmm. Контур тока входит в состав объекта управления контура скорости. Без учета ЭДС двигателя (ключ К1 на рис. 5.17 разомкнут) и при Мс = 0 передаточная функция разомкнутого контура скорости имеет вид: где DT(p) = 2Тр(Тр + 1) + 1 - характеристический полином оптимизированного замкнутого контура тока. Настраивая контур скорости на модульный оптимум с желаемой передаточной функцией Wuy"M = ATpDjipY определяем тип и параметры регулятора скорости: ЛИГ ( „\ ОжелС/7) k0TkaJ кот Тм j/с 79. w?c{p) = ЖАрТ = ЩТГГкЖ 47; =крс- (572) Для получения МО в контуре скорости требуется П-регулятор скорости, реализуемый как усилитель с характеристикой управления: иРС = кРСиу для -иК < иу < ик, ырс = "нас Sign Uy для \uy I > UK, где wHac = w3 т = k0T I3. Передаточная функция замкнутого контура скорости (ключ К2 на рис. 5.17 замкнут) относительно скорости определяется выражением ад-4\%г n*74 г(5-73) »3.Лр) 4TpDT(p) + l где малая постоянная времени 7 = Тп. Реакция оптимизированного контура скорости на возмущение по моменту нагрузки при изс = 0 определяется передаточной функцией по данному воздействию, которая находится из структурной схемы рис. 5.17: W(p) = P± = ME* Ml(5 74) WP) МХр) AT,pDT(p) + \ p3 °JV где Рз - жесткость механической характеристики электропривода с настроенным на МО контуром скорости; / Т В = = в " Рз 4ГМ Р4Т/ где р - жесткость естественной механической характеристики электропривода (р = J/TM). Регулирование скорости пропорциональным регулятором оказывается статическим. В зависимости от значения отношения ТМ/(4Т) жесткость замкнутого электропривода может быть больше, меньше или равной жесткости естественной характеристики (рис. 5.20). Для получения астатического регулирования скорости может быть использован симметричный оптимум на основе ПИ-регуля-тора скорости (ПИ-PC). Согласно (5.72) передаточная функция ПИ-PC определяется на основании известной для СО желаемой передаточной функции разомкнутого контура: W (п) - st»p + l k*jp щр + 1 PCW S-4-T?p2DT(p)lVK,(P) щр
Рис. 5.20. Механические характеристики электропривода с подчиненным регулированием тока и скорости: 1 - при ПИ-РС; 2 - при П-РС и ГМ/(4ГЦ) > 1; 3 - при П-РС и ТМ/(4Т) =\;4-при П-РС и ТМ/(4Т) < 1; 5 - динамическая механическая характеристика Передаточная функция замкнутого контура скорости с ПИ-РС определяется выражением WW + > . (5.76) "3.c(/j) 87>[4Гмр/Л.(/>) + 1] + 1 Реакция оптимизированного по СО контура скорости на возмущение по моменту нагрузки при изс = 0 определяется передаточной функцией wAco(i) DT(p) ЩрМс мКЮ Мс(р) STllp[4TiipDT(p) + \] + l 83 Регулирование скорости при ПИ-РС оказывается астатическим, т. е. механическая характеристика электропривода вне действия то-коограничения имеет в установившихся режимах (р = 0) бесконечно большую жесткость (характеристика 1 на рис. 5.20). Согласно формулам (5.73), (5.76) характеристические полиномы замкнутого контура скорости с П-РС и ПИ-РС имеют соответственно третий и четвертый порядки. В практических расчетах данные полиномы заменяют без значительной погрешности на полиномы второго порядка, пренебрегая в контуре тока малой постоянной времени Гй (DT(p) = Tj> + 1 = 2Тр + 1) или принимая контур тока за безынерционный (DT(p) =1). Отработка контуром скорости скачков задающего воздействия или момента нагрузки в относительных единицах ю/со3, М/Мс или i/Ic согласно передаточным функциям (5.76) и (5.77) показана на рис. 5.21. Отработка небольшого скачка задания скорости, когда отсутствует насыщение регулятора скорости (иРС < ынас), происхо-
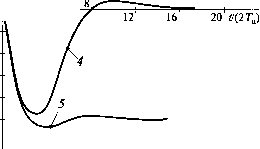 -0,2 -0,4 -0,6 -0,8 -1,0 Дсо/(Л/с/рз) Рис. 5.21. Переходные функции относительных значений тока, момента, скорости по задающим воздействиям при модульном оптимуме (/), симметричном оптимуме без входного фильтра (2) и с входным фильтром (3), а также переходные функции относительного перепада скорости по скачку момента нагрузки при симметричном (4) и модульном (5) оптимумах дит при П-РС с перерегулированием ст = 8 % (кривая /), а при ПИ-РС и фильтре с постоянной времени 8Гцна входе контура - с ст 6,2 % (кривая 3). Аналогично протекает и процесс наброса момента нагрузки. При большом скачке задания скорости, когда нРС = инас, контур тока обеспечивает постоянство тока /= итс/кол (без учета влияния ЭДС двигателя) и линейное нарастание скорости до момента времени, когда РС выходит из насыщения. Далее снижается задание на ток, который стремится к нулю при Мс = 0, а скорость стремится к значению со0 = изс/кос. Динамический перепад скорости Асо в режиме наброса момента нагрузки Мс определяется в соответствии с передаточной функцией W = wir = гёг = - дтЦ;(1 -<5-78> с/Рз 4ГмрМс Alp Подставляя в (5.78) выражение для W3{p), получаем при П-РС w (р) = Пт (5 79) и при ПИ-РС WM =-/W) .(5.80) Данным передаточным функциям соответствуют кривые динамического перепада скорости 4 и 5 на рис. 5.21. Внутренняя связь по ЭДС двигателя при сохранении стандартных настроек регуляторов несколько повышает демпфирование и снижает перерегулирование в режимах отработки сброса-наброса момента нагрузки. Как отмечалось выше, ЭДС оказывает влияние и на работу контуров тока и скорости при отработке входных воздействий, снижая динамический ток при скачке задания и повышая ошибку отработки скорости при ее линейном задании. Однако существенное влияние ЭДС проявляется только при неблагоприятном соотношении параметров (пониженные значения Тм и Тэ, повышенное значение !ГМ). Простота П- и ПИ-регуляторов и их оптимальных настроек обусловила преимущественное применение данных регуляторов в системах управления с подчиненным регулированием координат электропривода. Рассмотрим пример синтеза регуляторов тока и скорости в системе подчиненного электропривода. Задача. Определить тип и параметры регуляторов тока и скорости, составить принципиальную схему их аналогового исполнения при условии токоограничения на уровне максимально допустимого тока двигателя и статизма контура скорости не более 5 %. Исходные данные: силовая часть электропривода представляет собой систему ти-ристорный преобразователь - двигатель постоянного тока с независимым возбуждением; номинальные напряжение, ток, момент и скорость двигателя UmM = 220 В, /ном = 21 А, Мном = 23,5 Н м, соном = 162 рад/с; максимально допустимые ток и момент двигателя /тах = 63 А, Мтах = 70Нм; передаточный коэффициент и момент инерции двигателя кд = = 0,83 радДВс), /=0,05 кгм2; сопротивление и электромагнитная постоянная времени якорной цепи Д, = 1,8 Ом, Т3 = 0,022 с; максимальная ЭДС, коэффициент усиления и постоянная времени тиристорного преобразователя Еп тах = 300 В, кп = 25, Tn = 7J, = = 0,01 с; а также передаточный коэффициент тахогенератора ктг = кох = = 0,032 В•с/рад. По условию задачи принимаем за элементную базу построения регуляторов операционные усилители с напряжением питания +15 В и выходным стабилизированным напряжением +10 В (например, микросхемы типа К553 УД2). Для контура тока без учета влияния ЭДС двигателя используется пропорционально-интегральный тип регулятора с передаточной функцией lVpr(p) = (TKlp+ 1)/Т01р и параметрами Тк1 = ТЭ = = 0,022 с, Г0, = 27;&т. Для заданного токоограничения на уровне 4iax = 63 А и максимального стабилизированного напряжения на входе контура тока w3Tmax = инас = 10 В определяем коэффициент обратной связи по току £о.т= "нас/4ах = 0,1б Ом и постоянную интегрирования регулятора Т01 = 0,02 = 0,0225;°оД6 = 0,044 с. «я1,8 Действие ЭДС двигателя на контур тока при пуске с насыщенным регулятором скорости снижает максимальный ток до значения 2Т 1 + - Т 1 м Здесь ГМ = £2ЛЯ/=0,832- 1,8 0,05 = 0,062 с. Подставляя полученное значение в приведенную выше формулу, получаем 63 1+0,02 = 47,7 А. 0,062 При выборе типа регулятора скорости следует учитывать допустимый по условию задачи статизм регулирования скорости 5; Дз.ном Мном 1 ,п пг идоп-„ - и,UJ- ю0«0 Рдоп Статизм, соответствующий естественной механической характеристике электропривода, составляет г rг rXI 8 g * ном я 1 ном "я -> i, ° -0 16 Епо 7Н0М/?Я + соном/А:д 233 Следовательно, требуемое повышение жесткости механической характеристики R * 0 16 5 „еп 0,05 0 ... 18 19 20 21 22 23 24 ... 49 |












