Раздел: Документация
0 ... 16 17 18 19 20 21 22 ... 49 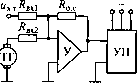 Рис. 5.10. Схема узла упреждающего токоограничения: Д - электродвигатель; ТГ - тахогене-ратор; У - суммирующий усилитель; УП - управляемый преобразователь димости при малой инерционности якорной цепи ток может успеть возрасти до величины, превышающей стопорное значение. Свободно от этого недостатка так называемое упреждающее токо-ограничение. Идея упреждающего токоограничения заключается в том, что соответствующий заданному допустимому уровню тока управляющий сигнал подается одновременно с задающим сигналом. Это осуществляется подачей на вход преобразователя управляющего сигнала, возрастающего одновременно с ростом скорости за счет положительной связи по скорости. Схема узла упреждающего токоограничения приведена на рис. 5.10. В соответствии со схемой можно записать для безынерционного преобразователя kykn (и„ + £0 ссо) = ел = со + (Тэр + l)inRn, где ку - коэффициент усилителя; кП - коэффициент усиления 777; кос - коэффициент положительной обратной связи по скорости, В-с/рад, кол = ктТ; кл - передаточный коэффициент двигателя, рад/(В-с). Пусть кукпкакос = кс = 1, тогда (T3p + l)in=kykn-(5.44) и в установившемся режиме h = 7"ст = кукп = const.(5.45) Коэффициент усиления усилителя рр fa = ос о.с У 7?вх1 RBx2 + Rjr Вместо связи по скорости может использоваться положительная связь по напряжению U-E„-/я7?„: ("з.т + К.НЕ„ - k0,HRnQkykn = Еп,(5.46) где кон - коэффициент обратной связи по напряжению. Принимая характеристику управления УП на начальном участке линейной и выполняя условие кукпком = 1, получаем выражение для стопорного тока Охваченный положительной обратной связью по напряжению с критическим значением коэффициента к0И = 1/(кукп) преобразователь приобретает свойства управляемого источника тока. Внешняя характеристика преобразователя, построенная на основании выражения (5.46) с учетом нелинейной зависимости Еп от иу, изображена на рис. 5.11. Штрихпунктирными линиями со стрелками пояснено определение значения Еп для некоторого значения тока Значение стопорного тока существенно зависит от зоны нечувствительности и гистерезиса в характеристике преобразователя, дрейфа нуля усилителя, а также от значений 7?я и Rn, которые не остаются постоянными при изменении температуры. Это является недостатком рассмотренного способа токоограничения. К его достоинствам можно отнести предупреждение пиков мгновенного тока и простоту реализации. Так, с помощью одного тахогенератора можно обеспечить в электроприводе как токоограничение, так и стабилизацию скорости. Рассмотрим совмещенный узел с отсечками по скорости и току (рис. 5.12, а). Сигнал иотпосле датчика тока и стабилитрона подается на вход усилителя У2. Предположим, что усилитель У1 насыщен, т.е. и, = «нас (рис. 5.12, б). Тогда по заданным значениям /отс и /ст согласно выражению (5.42) можно определить коэффициент усиления по контуру тока кг. Для линеаризованных характеристик управления усилителя, преобразователя и обратной связи с отсечкой электромеханическая характеристика электропривода при блокированной обратной связи по скорости (му > иК; 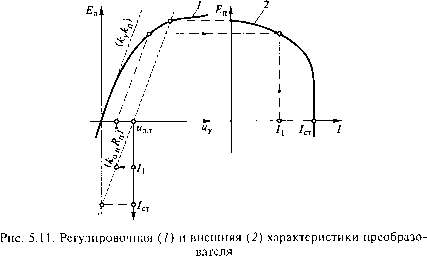 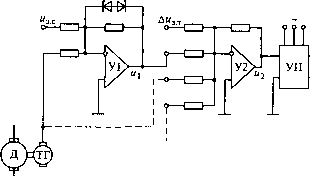
*й-4
Рис. 5.12. Схема совмещенного узла с отсечками по скорости и току (а) и характеристика отсечки по скорости (б) со т-("з.с - мк) = соотс) имеет вид, показанный на рис. 5.13. При о.с действии отрицательной связи по скорости получим семейство характеристик для различных значений текущего напряжения изс = const (мзс1, изс2, изс3). Характеристики имеют три участка: 1- действует отрицательная связь по скорости в интервале от со0 до со(/отс) (/< /отс; со > соотс); 2- действует связь по скорости и токовая отсечка в интервале скоростей от со(/отс) до соотс(/> /отс, со> соотс); 3- действует только токовая отсечка (1> /отс, со < соотс). Зная значения Ептт и /отс, можно найти граничное значение задающего напряжения, которому соответствует совмещение отсечек по скорости и току (точка Ьк для изс2на рис. 5.13): мз.с = мк + о.сд(птах отся)-(5.48) При этом значении задающего напряжения электромеханическая характеристика привода имеет только два участка, на одном из которых действует только связь по скорости, а на другом - только связь по току. При больших значениях изс («зс3на рис. 5.13) на электромеханической характеристике появляется средний участок, где /я < /отс и со < соотс, т.е. не действуют обе связи. Таким образом, совмещенный узел двух отсечек, обеспечивая жесткие механические характеристики в зоне рабочих нагрузок, выполняет одновременно функцию токоограничения при больших нагрузках, когда /я > /отс.
Рис. 5.13. Внешние характеристики электропривода с совмещенным узлом с отсечками по скорости и току В переходных процессах при выходе электропривода на участок /, где действует отрицательная связь по скорости, возможен резко колебательный режим. Для демпфирования колебаний могут быть применены дополнительные обратные связи, которые настраиваются как модальный регулятор на требуемые динамические показатели, как это было описано в подразд. 5.1. 5.3. Системы управления с подчиненным регулированием координат 5.3.1. Принципы оптимизации в системе подчиненного регулирования В теории автоматического управления для замкнутого контура с передаточной функцией т W3(P) = ± =-т-(5-49) (=1 известны различные критерии оптимизации с помощью настройки регулятора, последовательно включенного с объектом управления. Широкое применение для электроприводов нашел динамический оптимум, так называемый Betragsoptimum - модульный оптимум (МО), означающий следующее [28]: замкнутый контур динамически оптимален, если он одинаково передает на выход раз-ночастотные входные сигналы на возможно большем интервале частот, т.е. на этом интервале модуль АЧХзамкнутого контура Hv,3(/<o) = const.(5.50) Условие (5.50) выполняется, если при со>0 возможно большее число производных модуля АЧХ по частоте стремится к нулю, т. е. lim 1 .3Vy "=0.(5.51) шО ДСОV Условию (5.51) соответствуют определенные соотношения коэффициентов числителя и знаменателя передаточной функции замкнутого контура (5.49): (а2 - 2aQa2)di = (d{2 - 2d0d2)ai (aj - 2ахаъ + 2a0a4)d$ = (d\ - 2d]d3 + 2dQdA)a{] ........................................................................ (5.52) (a2 + 2£(-l)4-/av+z)4>2 = id2 + 2£(-1)Ч-,<+(>о2- i=i(=i В формулировке модульного оптимума есть некоторая неопределенность, выраженная словами «возможно большем...». Теоретически МО может дать бесконечно большую полосу пропускания контура (со,,.,, -» да), если в выражении (5.49) т = п и а,= d} (рис. 5.14). Однако практически это недостижимо из-за ограниченных возможностей реальных регуляторов и конечной полосы пропускания датчиков. Поэтому модульный оптимум называют также практическим или техническим оптимумом. Оптимизация на максимум полосы пропускания является также и оптимизацией по быстродействию. Чем шире полоса пропускания, тем меньше время переходного процесса контура. В инерционном контуре регулирования можно выделить две части - с большой инерционностью и с весьма малой инерционностью, обусловленной фильтрами датчиков и преобразователей сигналов и характеризуемой некоторой малой постоянной време- 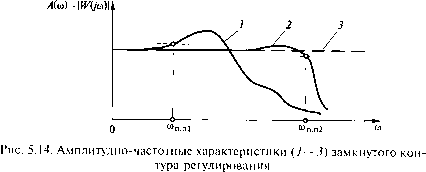 Wp(p) =--,(5.54) ни Т. Передаточная функция объекта управления с учетом Ги имеет вид W0,(p) =--,(5.53) (6о+!>,/>, )(7> + 1) где к0 v - коэффициент усиления объекта управления. Принимая для регулятора передаточную функцию вида m 1=1 Т0Р получаем для замкнутого контура передаточную функцию W3{p) = f = --j-И-=- (5-55) 3 -г Р(Ь0 +%Ь,р)(Т11р + 1) + а0 + aiP о.у/=11=1 Коэффициенты регулятора а0, аь Т0 находятся из уравнений (5.52). Очевидно, что условие (5.50) будет выполнено максимально, если принять m = к, д0 = Ьа, я, = Тогда, при Ьй = 1 w3(P) = -f--•(5-56) 1р{Тр + \) + \ Ко.у Согласно первому уравнению (5.52) 0 Го У 7т к V. о.у ) откуда -г = 27;;(5.57) W (р) = ---(5-58) зоптШ 27>(7> + 1) + 1 Таким образом, регулятор, компенсирующий инерционности объекта управления, кроме малых фильтровых, и имеющий интегральную составляющую с постоянной времени Т0 = 2коуТ, обеспечивает максимальное быстродействие замкнутому контуру. Для объекта управления в виде колебательного звена второго порядка потребуется пропорционально-интегрально-дифференциальный (ПИД) регулятор; для апериодического звена первого порядка - пропорционально-интегральный (ПИ) регулятор; для интегрального звена - пропорциональный (П) регулятор. 0 ... 16 17 18 19 20 21 22 ... 49 |












