Раздел: Документация
0 ... 19 20 21 22 23 24 25 ... 49 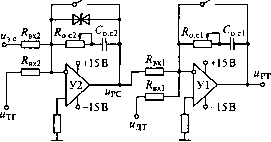 Рис. 5.22. Схемы регуляторов тока и скорости Пропорциональный регулятор скорости обеспечивает повышение жесткости р Тм 0,062 4Т„ 0,04 1,55. Таким образом, П-РС не обеспечивает требуемого статизма регулирования скорости и следует принять пропорционально-интегральный тип регулятора с передаточной функцией Тк2Р +1 WPC(p) Т<пР и параметрами Тк2 = 8 Т = 0,08 с; Тй2 = 8 7;ДРС. Здесь кРС = кдкот J =5,2. Отсюда Т02 = ф- = 0,0154 с. 47; 5,2 Для реализации регуляторов тока и скорости используем операционные усилители в схеме включения ПИ-регулятора (рис. 5.22). Параметры регуляторов обеспечиваются соответствующими значениями сопротивлений и емкостей с учетом условия, что сопротивление нагрузки усилителя RHzr должно быть не меньше допустимого Raon (для типовых микросхем R = 2 кОм). Для регулятора тока С0с1 = 0,5 мкФ; К0с1 = 44 кОм; TKl = RoCiCoc[ = = 0,022 с; Rml = 88 кОм; T0l = RmlC0,ci = 0,044 с. Для регулятора скорости Сос2 = 1 мкФ; Roc2 = 80 кОм; Тк2 = = Я0.с2С0,с2 = 0,08 с; RBx2 = 15,4 кОм; Т02 = RBx2Coc2 = 0,0154 с. Максимальное задающее напряжение t73cmax = koc kaEn0 = 0,032 х х 0,83 -233 = 6,2 В. 5.3.3. Система двухзонного регулирования скорости электропривода В системах двухзонного регулирования скорости основная часть (до номинальной скорости) всего диапазона регулирования обес- печивается изменением напряжения на якоре двигателя от нуля до номинального значения при номинальном потоке возбуждения, а при скорости выше номинальной (в верхней части диапазона регулирования) - изменением потока возбуждения двигателя при постоянном напряжении на якоре или ЭДС двигателя. Анализ и синтез контуров регулирования тока якоря и скорости двигателя при постоянстве потока возбуждения были рассмотрены выше. В настоящем подразделе рассматриваются особенности управления при регулировании скорости лишь в зоне изменения магнитного потока двигателя. По мере увеличения скорости выше номинальной (со* = со/соном > > 1) за счет уменьшения магнитного потока Ф* = Ф/Фном = 1/со* при U* = U/UH0M = 1 допустимый момент двигателя при /* = 1/1И0М = = 1 меняется пропорционально потоку (М* = Ф*), а допустимая мощность Р = Р/Риом = 1 остается постоянной. Поэтому применение двухзонного регулирования скорости целесообразно для тех производственных механизмов, у которых на высоких скоростях снижается момент статической нагрузки. Примером таких механизмов являются реверсивные станы горячей прокатки, у которых при последних пропусках, когда длина прокатываемого металла становится значительной, а усилия его обжатия снижаются, с целью уменьшения времени прокатки и увеличения производительности стана скорость привода увеличивается за счет уменьшения магнитного потока двигателя. Широко применяется двухзонное регулирование скорости и для металлорежущих станков, у которых в зависимости от направления движения рабочего инструмента и режимов резания заметно меняются моменты статических нагрузок. Электропривод с двухзонным регулированием скорости (рис. 5.23), кроме системы регулирования скорости с подчиненным контуром тока (см. рис. 5.16), содержит внутренний контур тока возбуждения (КТВ) и внешний контур ЭДС двигателя (КЭ) (иногда - напряжения на якоре двигателя). Контур тока возбуждения включает в себя тиристорный возбудитель ТВ, регулятор тока возбуждения РТВ с выходным напряжением иРТВ, датчик тока возбуждения ДТВ с коэффициентом передачи котв, шунт тока возбуждения ШВ в цепи обмотки возбуждения двигателя ОВД. На входе РТВ сравниваются напряжение задания щтв тока возбуждения и напряжение обратной связи иотв с выхода ДТВ. Контур ЭДС включает в себя замкнутый КТВ, регулятор ЭДС двигателя РЭ и датчик ЭДС двигателя ДЭ с передаточным коэффициентом каэ. Выходное напряжение ДЭ "дэ = *дэ[ U„ - /яя.д(1 + Тяр)) = каэЕл пропорционально ЭДС двигателя Ед. Здесь Тя = Ьял/Рял - электромагнитная постоянная времени якоря двигателя. 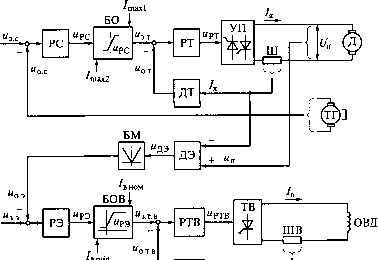 ДТВ Рис. 5.23. Функциональная схема электропривода с двухзонным регулированием скорости Поскольку при изменении направления скорости двигателя знак Мдэ меняется на противоположный, а знак напряжения отрицательной обратной связи по ЭДС иоэ на входе РЭ меняться не должен, к выходу ДЭ подключается блок выделения модуля ЭДС БМ. Напряжение задания ЭДС двигателя изэ устанавливается равным выходному напряжению ДЭ иаЭтм I ПРИ номинальной ЭДС двигателя. Поэтому при работе двигателя со скоростью менее номинальной (в первой зоне диапазона регулирования скорости), когда щ э > и0 э, при и0 з < мДЭном I выходное напряжение РЭ «РЭ за счет интегральной составляющей его передаточной функции становится максимально допустимым и ограничивается с помощью блока ограничения возбуждения БОВ на уровне, при котором напряжение изтв на входе замкнутого КТВ будет определять задание номинального тока возбуждения двигателя /вном Благодаря этому в первой зоне диапазона регулирования скорости двигателя (при со < соном) ток его возбуждения поддерживается на уровне номинального. Как только ЭДС двигателя достигнет номинального значения (при со = соном), при котором напряжения иоэ и изэ сравняются, регулятор РЭ выйдет из режима ограничения его выходного напряжения и контур КЭ замкнется. При этом система перейдет в режим стабилизации номинальной ЭДС двигателя, а увеличение скорости двигателя выше номинального значения будет происходить уже за счет уменьшения тока и, соответственно, потока возбуждения двигателя. Минимально допустимый ток возбуждения -4min> ПРИ котором скорость двигателя достигает максимального значения сотах, ограничивается предельно минимальным выходным напряжением w3TB блока БОВ. Кроме обратной связи по ЭДС двигателя в системах двухзонного регулирования скорости возможны варианты ослабления потока двигателя в функции выходного напряжения или ЭДС управляемого преобразователя. Отличия между ними в технической реализации датчиков напряжения или ЭДС преобразователя, а также в синтезе регуляторов контуров напряжения и тока возбуждения двигателя [2, 22]. Обобщенная структурная схема электропривода с двухзонным регулированием скорости с обратной связью по ЭДС двигателя представлена на рис. 5.24. Передаточные функции между моментом и током якоря, а также между ЭДС двигателя и его скоростью зависят от магнитного потока двигателя. Этот факт отражен введением в структурную схему якорной цепи двигателя функций произведения между указанными переменными. Передаточная функция между выходной ЭДС тиристорного возбудителя ТВ и напряжением управления иу в = ыРТВ w„M = ЕпЛр) ~ к п.в иУ.в(/>) Т„лр + 1 где кпв - передаточный коэффициент тиристорного возбудителя, п.в =-Еп.в.ном/му.в.ном; Тп.в - суммарная постоянная времени цепи управления тиристорным возбудителем. Передаточная функция между выходной ЭДС тиристорного возбудителя и током обмотки возбуждения двигателя 1В с учетом вихревых токов в стали его магнитопровода и без учета потока рассеяния wbt(p)- 1лр) - твтр + 1 епЛр) RA(TB + TB,)p + iy где Твт - электромагнитная постоянная времени фиктивной ко-роткозамкнутой обмотки двигателя, учитывающая влияние вихревых токов, наводящихся в полюсах и станине двигателя при быстрых изменениях в них магнитного потока (Гвт = (0,06...0,2)71,; наибольшие значения имеют двигатели с нешихтованными станинами); RB - суммарное сопротивление цепи обмотки возбуждения двигателя, включающее сопротивление обмотки возбуждения и эквивалентное сопротивление силовой цепи собственно тиристорного возбудителя; Ть - электромагнитная постоянная времени обмотки возбуждения. Последняя определяется по формуле Тъ - LB/ RB, где LB - индуктивность обмотки возбуждения на линейном участке кривой намагничивания. При этом где рп - число пар полюсов двигателя; кшс - коэффициент насыщения кривой намагничивания, кшс = 1вмоы/1влтн; wB - число витков обмотки возбуждения на полюс. Под /влин понимают ток возбуждения, создающий номинальный поток Фном при отсутствии насыщения магнитной цепи двигателя. Передаточная функция между током обмотки возбуждения двигателя и магнитным потоком ф{р) IAp)~Tb.tP + V где кф - коэффициент взаимосвязи между приращениями тока и потока возбуждения двигателя на кривой намагничивания, представляющий собой тангенс угла наклона касательной к кривой намагничивания в рабочей точке, кф = АФ/А1в. Передаточная функция цепи обратной связи по току возбуждения двигателя определяется результирующим коэффициентом передачи шунта ШВ в цепи обмотки возбуждения и датчика тока ДТВ. Система двухзонного регулирования скорости в соответствии с рис. 5.24 существенно нелинейна, поскольку содержит в себе как функции произведения переменных, так и нелинейности блоков ограничения БО, БОВ, БМ, а также кривой намагничивания двигателя. Нелинейными могут быть и регулировочные характеристики преобразователей ТП и ТВ. Поэтому анализ и синтез подобных систем принято выполнять в «малом» при линеаризации нелинейностей в их рабочих точках. Линеаризованная структурная схема электропривода с двух-зонным регулированием скорости приведена на рис. 5.25. Здесь, по сравнению с рис. 5.24, текущие значения переменных заменены на их отклонения от начальных значений при работе системы с начальными скоростью сонач током /янач, моментом Мнач и потоком Фнач двигателя. При линеаризации в данном режиме результирующие отклонения момента и ЭДС двигателя от их начальных значений как итог операций перемножения тока и скорости двигателя на его магнитный поток с учетом собственных отклонений указанных величин от начальных значений будут определяться следующим образом: АМЪ = Мшч - (/я.нач + А1я)(кФнт + АФ) = кФнт А1Я + /янач кАФ+А1яАФ; Д£д2 = Еа нач - (сонач + Дсо)(£Фнач + ДФ) = кФнт Дсо + сонач кАФ + ДсоДФ. 0 ... 19 20 21 22 23 24 25 ... 49 |












