Раздел: Документация
0 ... 23 24 25 26 27 28 29 ... 49 коллектора и потребности в дефицитном материале - меди, обладающий повышенной инерционностью и ограниченной перегрузочной способностью. Лучшие динамические и стоимостные показатели имеют асинхронные и синхронные двигатели, а также двигатели индукторного и вентильно-индукторного типов. Если этим двигателям с помощью управляемых полупроводниковых средств придать свойства бесколлекторного двигателя постоянного тока, то могут быть использованы простые структуры управления электропривода постоянного тока, обеспечивающие высокие регулировочные свойства и динамические показатели. Рассмотрим один из вариантов бесколлекторного двигателя постоянного тока - вентильный двигатель, выполненный на основе трехфазной синхронной машины с постоянным магнитом (рис. 6.1). Обмотки статора получают питание от источника постоянного тока через мостовой коммутатор с шестью управляемыми полупроводниковыми ключами К1-Кб. Нумерация ключей соответствует очередности их коммутации с угловым интервалом 60 электрических градусов (эл. град). Ключи управляются выходными сигналами vv-v6 распределителя импульсов (РИ). Направление коммутации - прямое (правое) вращение (ПВ) или обратное (левое) вращение (ЛВ) - определяется выходными сигналами узла направления вращения (УНВ) в зависимости от знака входного управляющего воздействия ит За один цикл коммутатора вектор намагничивающей силы статора (НС), пропорциональной произведению тока / на число витков w фазы (F = 7з/и>), делает  Рис. 6.1. Схема включения вентильного двигателя один оборот на 360 эл. град. Диодный мост с обратной относительно напряжения питания полярностью создает контуры для спадания тока в обмотке при отключении соответствующего ей ключа. Если при отключенном датчике положения ротора (ДПР) подавать через РИ в функции времени с некоторой неизменной частотой /управляющие импульсы, то коммутатор будет работать как инвертор преобразователя частоты и двигатель будет вращаться с неизменной частотой вращения 2nf. При этом будут наблюдаться пульсации скорости из-за дискретного характера вращения НС по сравнению с вариантом питания двигателя от трехфазной сети переменного тока. При низкой частоте двигатель входит в шаговый режим, когда пульсации скорости имеют паузы с нулевым значением. При включенном ДПР коммутация фазовых обмоток синхронного двигателя при вращении ротора аналогична коммутации коллектором секций якоря двигателя постоянного тока. В ВД функцию коллектора выполняет коммутатор, а функцию щеток - ДПР. В отличие от двигателя постоянного тока в ВД якорь и коллектор (статор и коммутатор) неподвижны, а щетки (ДПР) и магниты, расположенные на роторе, вращаются. Мостовой трехфазный коммутатор осуществляет шесть коммутаций за один электрический оборот (360 эл. град.), т. е. аналогичен коллектору с шестью пластинами двигателя постоянного тока. Для получения максимального среднего момента ВД с шестью тактами в оборотном цикле требуется установить ДПР на роторе так, чтобы начальный угол рассогласования между НС статора и ротора (угол включения) срнач на каждом такте равнялся бы 2я/3, а конечный угол (угол отключения) фкон - тс/3, т. е. фнач = (у - 0)нач = 2л/3; ipK0H = (у - 0)кон = тг/3. При этом фср = (фнач + Фкон) = rt/2- Процесс коммутации ключей с изменением угла рассогласования от 2к/3 до л/3 проиллюстрирован на рис. 6.2. Такая установка ДПР соответствует расположению щеток у двигателя постоянного тока на геометрической нейтрали. Среднее значение момента при синусоидальной угловой характеристике неявнополюсного двигателя Мср = 11 Mm sin Ф</ф = -Мт.(6.1) J 2я/3П Диаграмма работы коммутатора ВД на одном обороте ротора приведена на рис. 6.3. К основным узлам системы управления ВД относятся: датчик положения ротора; распределитель импульсов; узел направления вращения; коммутатор, который работает как инвертор тока или инвертор напряжения в зависимости от источника питания.
К2 + КЗ->-КЗ; у = -120°; 0 = 0..-60° -К2<-К2 + К1; у = -180°; в = -60...-120° Рис. 6.2. Угловая характеристика вентильного двигателя в функции разности углов намагничивающей силы статора (у) и положения ротора (8)
Рис. 6.3. Диаграмма работы коммутатора вентильного двигателя Датчик положения ротора (ДПР) может быть оптическим, индукционным, электромагнитным. Рассмотрим вариант оптического ДПР (рис. 6.4). На неподвижном кольцевом статоре ДПР расположены друг против дуга попарно светодиоды и фотодиоды: СД,,- ФДл, СДд- ФДВ, СДС-ФДС. Пары смещены по окружности друг относительно друга на углы 120° >„, где рП - число пар полюсов двигателя. На рис. 6.4 изображен двухполюсный вариант ДПР. Статор ДПР сочленен со статором двигателя так, что расположение трех пар из свето- и фотодиодов соответствует расположению обмоток фаз А, В, Сдвигателя. Ротор ДПР - сплошной в целом непрозрачный диск, имеющий лишь прозрачную сегментную щель, которая занимает по окружности диска угол 180°/рп- Ротор ДПР сочленяется с ротором двигателя так, чтобы осевая полюсная линия диска составляла с осевой линией магнита ротора двигателя угол 120°. 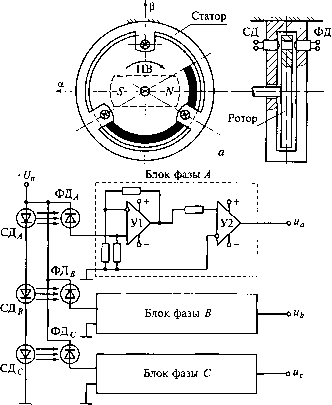 Рис. 6.4. Конструктивная (а) и электрическая (б) схемы оптического датчика положения ротора
я/3 2п/3 4я/3 5я/3 Рис. 6.5. Выходные сигналы датчика положения ротора Тогда при 0 = 0 для правого вращения активизируется ФД, срнач = = 120°, фкон = 60° и Л/ср максимален. Такая установка ротора ДПР соответствует расположению щеток у двигателя постоянного тока на геометрической нейтрали. При вращении ротора фотодиоды поочередно засвечиваются светодиодами и их усиленные и сформированные соответствующими блоками сигналы иа, щ, ис выделяются на выходе ДПР (см. рис. 6.4, б). Усилитель У1 усиливает слабый сигнал фотодиода, а усилитель У2 формирует выходной сигнал прямоугольной формы. Сигналы иа, щ, ис образуют трехфазную систему с угловой продолжительностью включения каждого сигнала - 180° на оборот ДПР (рис. 6.5). Распределитель импульсов (РИ,) вырабатывает управляющие импульсы и распределяет их по ключам коммутатора. На вход РИ поступают сигналы ДПР иа, иь, ис, из которых логическим способом формируются открывающие сигналы (с продолжительностью включения 120°) для ключей нечетной (анодной) группы (6.2) "к1 = *кЗ иаиь; и и четной (катодной) группы Ик4 = "а"*; ик6 - = им. <к5 им. <к2 им„ (6.3) Из сигналов ык, формируются два дополнительных сигнала: для запирания ключей нечетной группы - ЙК01 ="к1 + "кЗ +"к5(6-4) и четной группы - «к02 = "к2 +«к4 +"к6-(6-5) Диаграмма сформированных распределителем импульсов управляющих сигналов для правого вращения приведена на рис. 6.6. Порядок следования импульсов, коммутирующих ключи, задается одним из двух сигналов - правого (ПВ) или левого (ЛВ) вращения, поступающих на вход РИ от УНВ. Для смены направления вращения двигателя требуется изменить направление вектора намагничивающей силы статора на 180°. Для этого в ранее включенной паре ключей нечетный ключ нужно отключить и включить
0л/3 2л/3 я 4я/3 5я/3 2я в Рис. 6.6. Диаграмма сигналов распределителя импульсов четный ключ той же фазы, а для другой фазы отключить четный ключ и включить нечетный. Эта операция осуществляется сменой сигналов направления вращения с ПВ на ЛВ или наоборот. Например, если при включенных ключах КЗ и К4 сменить сигнал ПВ на ЛВ, то КЗ и К4 отключатся, а Кб и К1 включатся и возникающий отрицательный момент при движении ротора станет его тормозить, но коммутация ключей будет прямая (К1 + К2, К2 + + КЗ) до тех пор, пока ротор не начнет движения в обратном направлении, при котором направление коммутации изменяется на обратное. Данный процесс можно проанализировать по диаграмме, приведенной на рис. 6.3. Схема аппаратной реализации РИ на основе логических элементов представлена на рис. 6.7, а. Шесть выходных блоков коммутации (БК1, БКЗ, БК5 - для нечетной и БК2, БК4, БК6 - для четной групп ключей) выделяют сформированные и усиленные импульсы vu i>3, v5 и v2, v4, v6, непосредственно управляющие ключами с соответствующими номерами, а также создают сигналы «к01 и йк02, разрешающие работу нечетной и четной групп ключей. Алгоритм работы блоков БК для нечетной группы - упХ = икпХПВ+ икп2ЛВ(6.6) и для четной группы - v„i = Чкп2ПВ + икпХЛВ,(6.7) где «1 = 1, 3, 5; п2 = 4, 6, 2. Выходные сигналы vnX и vn2 отличаются от wK„, и ик„2 небольшим запаздыванием на включение и отключение, которое дается ап- 0 ... 23 24 25 26 27 28 29 ... 49 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












