Раздел: Документация
0 ... 24 25 26 27 28 29 30 ... 49 Ua о-о- ВД-? "к1 г кБК4. "кЗ т "Л ис о-о- кБКб «к5 "а к БК2 «к4 Л5 Я5 о о "к4 "кЗ «Кб "к5 "к2 "к4 "к1 "кб "кЗ "к2 "к5 БК1 БКЗ БК5 "кЗ "к5 БК4 БК6 БК2 «к4 «Кб "к2 -о f3(K3) -о о"к01 t>5(K5) -о f4(K4) f6(K6) -о -°«k02 f2(K2) -о "к1 „ лв°- "к4 „  Рис. 6.7. Схемы распределителя импульсов (а) и блока коммутации (сТ) паратуре на собственное время срабатывания до момента включения или отключения ключа коммутатора. Схема блока коммутации (для примера взят блок БК1) приведена на рис. 6.7, б. Конденсатор С создает необходимую задержку времени на включение V\. Выходной сигнал ик1 равен единице в течение всего цикла РИ за исключением небольшого интервала задержки включения v{ при ПВ = 1 или JIB = 1, когда ик1 = 0. Как показано на рис. 6.7, а, монтажное И формирует сигналы и к01 wk1Wk3Mk5> wk02 = мк2мк4мк6- (6.8) (6-9) Узел направления вращения (УНВ) формирует сигналы для РИ, определяющие чередование фаз на статоре для правого и левого вращения ротора двигателя. При измерении датчиком модуля выходного тока коммутатора УНВ может выполнять дополнительную функцию формирования сигнала тока со знаком. Выходной сигнал УНВ формируется в зависимости от знака выходного напряжения управления иу. Алгоритм работы УНВ: ПВ=ПВ31ПВ;(6.10) ЛВ = ЛВ31ЛВ,(6.11) где ПВ3 = signwy - сигнал задания правого вращения; ЛВ3 = = signwy - сигнал задания левого вращения; /пв и 1ЛВ - сигналы наличия тока, или разрешения на ток, соответственно правого и левого вращения. При смене знака иу сохраняющееся некоторое время прежнее направление тока не совпадает с новым заданием вращения и согласно алгоритму (6.10) и (6.11) ПВ = ЛВ = 0. При этом коммутатор запирается. Смена сигналов ПВ, ЛВ разрешается УНВ, когда ток датчика тока (ДТ) спадает до близкого к нулю значения /ДТт1п. Пример выполнения УНВ на логических элементах приведен на рис. 6.8. Микросхема D1 с памятью сохраняет сигнал / на выходе усилителя А2 до тех пор, пока /дт > /ДТт1п. В состав силовой цепи ВД (рис. 6.9) входит коммутатор с транзисторными или тиристорными ключами, который совместно с обратным диодным мостом, блоком ограничения напряжения (БОН) и дросселем / образует инвертор напряжения или тока в зависимости от его питания от источника напряжения или тока. С питающей сетью переменного тока инвертор связан через мостовой трехфазный управляемый или неуправляемый 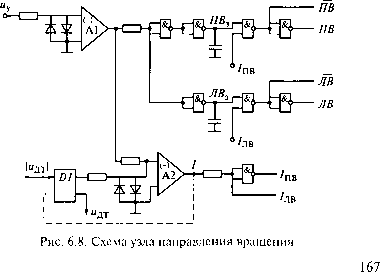 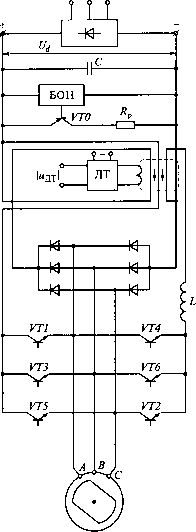 Рис. 6.9. Силовая цепь вентильного двигателя выпрямитель. Наиболее простым и распространенным вариантом для ВД является неуправляемый диодный выпрямитель. В схеме на рис. 6.9 показан вариант измерения модуля входного тока инвертора с помощью электромагнитного датчика тока, работающего в режиме магнитного усилителя, токи входных обмоток которого подмагничивают его сердечник. Когда двигатель оказывается в генераторном режиме, ток направлен встречно напряжению выпрямителя, выпрямленное напряжение Ud растет, что приводит к включению транзисторного ключа VT0 и подключению разрядного резистора Rp. Механические характеристики ВД могут быть получены на основании математического описания синхронной машины с постоянным магнитом в осях d, q [8]. Примем допущения, что ротор неявнополюсный, пространственная магнитодвижущая сила изменяется синусоидально, параметры фаз одинаковы. С учетом допущений система исходных уравнений будет иметь вид: d dt dQ Vq-7- = Ud =(7mcos(y-9); yd=Lid+4rB; dt iqR + ± + yd = Uq=Umsm(y-Q); yq = Liq; (6.12) Мэя= - = (viv? - \\iqid) = \/B/?) Pn где R, L, Um - соответственно активное сопротивление, индуктивность и амплитудное значение напряжения одной фазы в эк- Бивалентном двухфазном представлении двигателя; id, \\id - ток и потокосцепление по продольной оси; iq, \\fq - ток и потокосцепление по поперечной оси; vj/B - потокосцепление постоянного магнита ротора; М - момент на валу ротора с учетом числа пар полюсов рп двигателя. Решая систему уравнений (6.12) относительно iq для условия установившегося режима для iq = 1ди М: rdyq dWd =() dt dt , получаем выражения J , <7m(sin9-:Tcocos(p)-\/Bco. 4R(l + TW) {bU) VI/2 Mm(sm<p-Tcocos ф) - jO-f со М =--(6.14) 1 + Г2со2 Здесьф = у-9; ш = ; Т= L/R; Мт=рп-ц.Б. При сделанных допущениях Ф = ФсР = const = ! + Дфк,(6.15) где Дфк - угол смещения коммутации ключей инвертора, соответствующий углу смещения щеток с нейтрали в двигателе постоянного тока (Дфк = 0 - коммутация на максимальный момент, «щетки» ВД на нейтрали; Дфк > 0 - сдвиг по ходу ротора, отстающая коммутация; Дфк < 0 - сдвиг против хода ротора, опережающая коммутация). С учетом (6.15) выражение для момента получает вид: Mm(cosAqK + Tcosin Дфк) - рп --со М =-7-2-1--•(6Л6> 1 + Т В режиме короткого замыкания, когда со = О, Mia = MmcosA(pK,(6.17) в режиме идеального холостого хода, когда М = О, Ю°-р0-МтГ8тДФк(6Л8) гдеP°=PR-(6Л9) При условии Дфк = 0 имеет место наибольший момент короткого замыкания (Мкз = М„). При этом = гтй-(6-20) 1 + У со COn M„ (6.21) При скоростях coext = <в0 1± tw0 j имеют место два экст- ремальных значения момента - M„wx при отрицательной скорости и Мтт при положительной скорости. Выражение (6.16) для механической характеристики ВД определяет нелинейную взаимосвязь момента и скорости двигателя (рис. 6.10). Нелинейность вносит индуктивность, входящая в параметр Т и обусловливающая реакцию якоря синхронного двигателя, более существенную, чем в двигателе постоянного тока. Но при 7Ъ <к 1 М*Л/кз-р>,(6.22) т. е. при малой индуктивности якоря механическая характеристика ВД приближается к прямолинейной идеализированной характеристике двигателя постоянного тока с независимым возбуждением. Как следует из формул (6.16) -(6.21), регулировать момент и скорость ВД можно следующими способами: Лфк = var при неизменном напряжении или токе автономного инвертора (Um = const или = const);  Рис. 6.10. Механические характеристики вентильного двигателя: 1 - при отсутствии смещения угла коммутации (Л<рк = 0) и без учета электромагнитной постоянной времени Г=0); 2- при Афк = 0 и с учетом электромагнитной постоянной времени (Т* 0); 3 - при смещении угла коммутации по направлению вращения ротора (Дфк>0) и Т* 0; 4- при смещении против направления вращения ротора (Дфк < 0) и Т # 0 Ud = var за счет применения управляемого выпрямителя; Um = var при Ud = const за счет применения широтно-импульс-ного модулирования напряжения или тока. Однако при изменении указанных величин регулировочные механические характеристики остаются неблагоприятными по форме-в них отсутствуют участки со стабилизацией скорости и с ограничением момента на необходимом уровне. Для получения желаемых статических и динамических характеристик требуется система управления вентильным двигателем, формирующая необходимые характеристики. 6.1.2. Система управления электропривода с вентильным двигателем Для управления вентильным двигателем применима двухкон-турная структура электропривода постоянного тока с контурами тока и скорости. Задача контура тока - обеспечить постоянство тока инвертора и, следовательно, постоянство среднего момента двигателя в заданном диапазоне скоростей и в пределах допустимого значения тока. Контур скорости должен обеспечить необходимую жесткость механической характеристики ВД и требуемые динамические показатели электропривода. Данная двухконтурная система управления может строиться по принципу подчиненного регулирования. При этом задание на ток поступает с выхода регулятора скорости PC. Для ВД с постоянным магнитом и питанием от сети через неуправляемый выпрямитель, что характерно для электроприводов небольшой мощности, регулятор тока отличается от традиционного ПИ-регулятора, используемого в электроприводе постоянного тока. Достаточно простым и обеспечивающим практически астатическое регулирование тока является релейный регулятор тока РРТ. Двухконтурная система управления с РРТ для электропривода с ВД приведена на рис. 6.11. В качестве регулятора скорости может использоваться аналоговый П- или ПИ-регулятор, на вход которого поступает разность сигналов задания скорости ызс и обратной связи. Сигнал обратной связи подается с датчика скорости BR. Схема дополнена узлом фазосме-щения ФСУ, осуществляющим автоматическое опережающее смещение угла коммутации ключей в области высоких скоростей для уменьшения пульсаций динамического тока в двигателе. Сигналы с выхода распределителя импульсов РИ подаются через ключи D1 и D2 на формирователь импульсов ФИ. Выходные сигналы ФИ поступают на плечи автономного инвертора АИ, подключенного к источнику питания ИП с выпрямленным напряжением Ud. 0 ... 24 25 26 27 28 29 30 ... 49 |












