Раздел: Документация
0 ... 26 27 28 29 30 31 32 ... 49 Основные узлы системы управления показаны в виде функциональных блоков [7]: ФП1, ФП2 - функциональные преобразователи, формирующие синусоидальную и косинусоидальную функции входного сигнала; БП1, БП2 - блоки перемножения; УИТ1, УИТ2 - управляемые источники токов фаз а и Р; PC - регулятор скорости. Напряжение иДПР датчика положения ротора (ДПР) изменяется линейно на каждом обороте ротора (рис. 6.16, б). Функциональная схема аналогового ДПР, построенного на основе синусо-косинусного вращающегося трансформатора (СКВТ), изображена на рис. 6.17, а. Синусно-косинусный генератор (СКГ) питает обмотки аир СКВТ: иа = Uт sin со/; ир - Um cos со/. 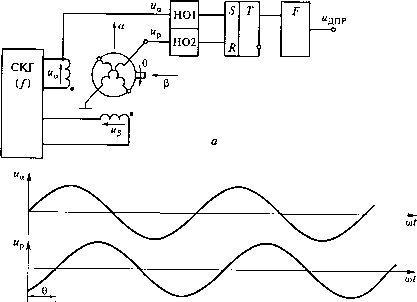 HOiL-L I со/ H02--L-. L » at
б Рис. 6.17. Функциональная схема аналогового датчика положения ротора (а) и диаграммы его выходного напряжения (б) В роторной обмотке СКВТ, работающего в фазовом режиме, наводится напряжение ир = иа cos 9 - «р sin 9 = Um sin(co/ - 9). Нуль-органы HOI и H02 выделяют на своих выходах импульсы в моменты изменения знака напряжений иа и ир с отрицательного на положительный. Импульсы с Н01 и Н02 управляют триггером, на выходе которого при фазовом сдвиге, равном 9, формируются прямоугольные импульсы напряжения иТ. Формирователь /"выделяет на выходе ДПР усредненное значение напряжения иап?. Диаграмма формирования выходного напряжения ДПР показана на рис. 6.17, б. 6.2. Системы управления скоростью асинхронного электропривода 6.2.1. Асинхронный электропривод с регулированием напряжения на статоре Характерной тенденцией автоматизированного электропривода является все более широкое применение асинхронных двигателей (АД). Эти двигатели технически более просты и надежны в эксплуатации, могут длительно работать при повышенных скоростях и температурах, в агрессивных и взрывоопасных средах, для их изготовления требуется меньше цветных металлов, они имеют меньшие массу, габариты и стоимость. Расширяются возможности и систем управления асинхронных электроприводов за счет создания управляемых преобразователей напряжения и частоты, а также микропроцессорных устройств с высоким быстродействием и большим объемом памяти. Изменение напряжения на статоре АД вызывает изменение его электромагнитного момента и, в итоге, угловой скорости двигателя. В разомкнутой системе асинхронного электропривода эффективность такого регулирования скорости ограничена весьма малым диапазоном устойчивых режимов работы двигателя. Расширить функциональные возможности асинхронного электропривода можно в замкнутых системах, используя в зависимости от технических требований различные виды обратных связей, например по скорости, напряжению и току статора АД. На рис. 6.18 приведена функциональная схема подобной системы регулирования скорости АД. Здесь изменение действующего значения первой гармоники напряжения U{ на статоре АД с частотой питающей сети /с осуществляется изменением угла регулирования а тиристорного преобразователя напряжения (ТПН) зи вм РС "РС VD1 л -и-П ~"с,/с 999 РТ "РТ ТПНа а " ь СИФУ =>7i 1*21 Z2i 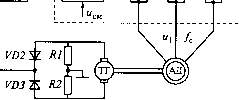 Рис. 6.18. Функциональная схема асинхронного электропривода с регулируемым напряжением на статоре на базе тиристоров, включенных по встречно-параллельной схеме в каждую фазу статора АД. Угол а формируется в системе им-пульсно-фазового управления (СИФУ) ТПН и меняется в зависимости от напряжения управления ыРТ на выходе регулятора тока (РТ). Напряжение смещения исм в СИФУ задает угол а = апих, при котором обеспечиваются минимальное выходное напряжение ТПН и момент трогания АД в режиме его холостого хода. На входе РТ суммируются напряжения иРС регулятора скорости (РС) и отрицательной обратной связи по току иотс отсечкой, реализованной на основе трансформаторов тока ТА, Тв, Тс, выпрямительного моста (ВМ), потенциометра RP и стабилитрона VD1. Значение тока отсечки /отс устанавливается потенциометром RP. На входе РС суммируются напряжение задания скорости изс и напряжение отрицательной обратной связи по скорости АД иос, подаваемое с тахогенератора (ТГ) на валу АД. Выделение модуля выходного напряжения ТГ обеспечивается диодами VD2, VD3 и резисторами RI, R2. Формирование темпа изменения скорости АД осуществляется с помощью задатчика интенсивности (ЗИ), на вход которого поступает напряжение управления скоростью АД иус. Изменение направления вращения вала двигателя может быть реализовано за счет реверсивного контактора в статорной цепи VS1 "с VS2 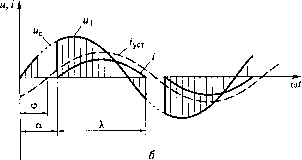 Рис. 6.19. Однофазная схема замещения (а) и диаграммы напряжения и токов для одной фазы ТПН (б) двигателя. Торможение и останов двигателя возможны в режиме динамического торможения, когда за счет специального блока логики управления тиристорами ТПН обеспечивается протекание выпрямленного тока по обмоткам статора. Для симметричной нагрузки, когда результирующие сопротивления обмоток статора и ротора всех фаз АД одинаковы, т.е. ZhA = ZnB = ZhC = ZH, режим работы ТПН определяется в соответствии с однофазной схемой замещения, показанной на рис. 6.19, а. Если в этой схеме условно закоротить тиристоры VS1 и VS2, то при активно-индуктивной нагрузке ZH = yJRl \- (coIH)2 установившийся ток в данной цепи U. sin (со/ -ф), где Um - амплитудное значение напряжения сети; а - угол отставания тока от напряжения сети ис, а = arctg(oiLH/RH) (рис. 6.19, б). Такой ток будет протекать в нагрузке, если VS1 и VS2 открывать в каждый полупериод точно в моменты времени, соответствующие углу а = ф. Если а > ф, то ток и напряжение нагрузки будут определяться следующими выражениями [20]: / = Ц. [Sin (со ф) - sin (а - ф)е-<ш-а)/1"]; н и = t7msin Ш при а < со/ < а + X; / = 0 и и = 0 при а + - я<сог<а. Угол проводимости тиристоров X зависит от а и ф и может быть определен для; = 0присог=аисог=а + А,из уравнения sin (а + + X-(p) = sm(a-(p)e-x/li". Отсюда максимальное значение угла проводимости равно к при а = ф, а минимальное равно 0 при а = тс. При увеличении угла а от ф до 7i среднее за полупериод значение напряжения нагрузки будет изменяться от наибольшего значения 2UJn до нуля. В общем случае отношение амплитуды первой гармоники напряжения нагрузки Umi к номинальному напряжению сети £Уном является функцией переменных ос и ф (рис. 6.20, а). Механические характеристики АД в разомкнутой системе для различных значений углов регулирования ТПН приведены на рис. 6.20, б. Предельные характеристики / и 2 соответствуют минимальному amin = фт1п и максимальному атах значениям угла регулирования, естественная механическая характеристика 3 - условию a = ф, а характеристика 4 - промежуточному значению amin < a < amax. При постоянстве скольжения АД его электромагнитный момент пропорционален (Um[/UmM)2. Поскольку индуктивная составляющая результирующей нагрузки ZH ТПН зависит от скольжения двигателя s, то и угол ф является функцией скольжения. Зависимость ф) (рис. 6.20, в) взаимосвязана с механической характеристикой АД, и при постоянстве угла а и нагрузки на валу двигателя имеются одинаковые значения ф при разных значениях скольжения (точки 7, 2 и 3, 4 на рис. 6.20, а, в). 0,8 0,6 0,4 0,2 0 а, = 30° а2=60° а3 = 90°
а4= 100° а5=110° а6=120° 20° 40° 60° 80° Ф° 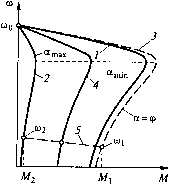 0 0,2 0,4 0,6 0,8 5 20° 40° 60° 80° ср°
Рис. 6.20. Зависимости выходного напряжения ТПН от его углов управления и нагрузки (а), механические характеристики АД (б) и зависимость угла нагрузки от скольжения АД (в) Синтез регуляторов скорости и тока в замкнутой системе регулирования скорости АД целесообразно начинать из условий статики. Статические регулировочные характеристики отдельных элементов электропривода, схема которого приведена на рис. 6.18, даны на рис. 6.21. Они представляют собой зависимости выходного напряжения регулятора скорости иРС от напряжения изс на выходе ЗИ (система координат ызс, Upj), выходного напряжения регулятора тока Ирг от напряжения иРС (система координат «РС, Ырт) и угла регулирования ТПН а от напряжения (система координат Upj, а). При линейных регулировочных характеристиках PC, РТ, СИФУ и действий обратных связей по скорости и току АД угол регулирования ТПН О. = ка{исм -/Срт[£рс("з.с -о.сЮ)-о.т(Л - /отс)]}. (6- 33) где ка - передаточный коэффициент СИФУ; kpj, кРС, кос, к0Т - коэффициенты усиления РТ, PC и обратных связей по скорости и току. Если в замкнутой системе регулирования скорости задается механическая характеристика двигателя с желаемой жесткостью Ржел, то коэффициент усиления PC без учета действия токовой отсечки может быть определен исходя из (6.33) как к?с = «тах - Ф1 МРт£о.с(<В2 -COl) (6.34) где се»! - заданная скорость двигателя на его естественной механической характеристике 7 (см. рис. 6.20, б) при а = фь со2 - 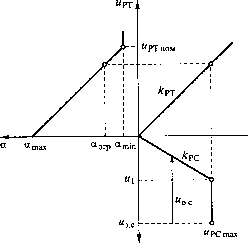 "PC Рис. 6.21. Регулировочные характеристики элементов системы управления электроприводом 0 ... 26 27 28 29 30 31 32 ... 49 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












