Раздел: Документация
0 ... 25 26 27 28 29 30 31 ... 49 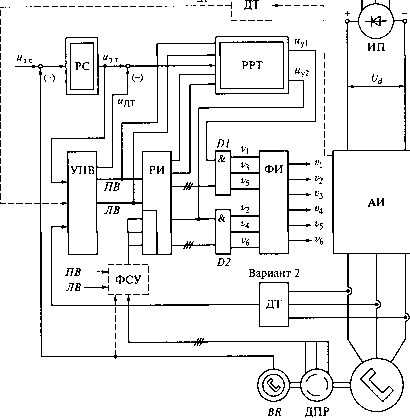 Рис. 6.11. Система управления вентильным двигателем Рассмотрим контур тока с РРТ. Регулятор тока, управляя ключами инвертора, поддерживает релейным способом заданное значение тока в пределах /з-А/доп</</3 + А/Доп.(6.23) Условие (6.23) выполняется за счет соответствующей коммутации ключей инвертора, создающей чередование трех режимов инвертора: Р2 - коммутация всех ключей обеих групп коммутатора для ПВ или ЛВ (потребление тока двигателем); РО - запрет на коммутацию обеих групп (ток от двигателя через обратный мост направлен встречно напряжению выпрямителя, его энергия расходуется на подзарядку конденсатора и в раз- рядном резисторе - кратковременный генераторный режим с возвратом энергии); Р1 - запрет на коммутацию ключей одной группы (цепь тока замыкается накоротко через работающую группу и обратный мост - режим динамического торможения). Алгоритм РРТ построен таким образом, что при /= /3 включается режим Р1. Через небольшую временную задержку т, « 1 мс происходит переключение с режима Р1 на режим Р2, если /3 -- А/д011 < / < 13, или на режим РО, если 13 - Д/доп > / > 13. Промежуточный режим Р1 может быть и очень кратковременным, если ток за меньшее, чем т,, время xlmin и 0,3 мс достигает граничного значения 13 - А/доп или 13 + А/доп. Данное переключение режимов коммутатора в функции тока релейным способом позволяет поддерживать заданное значение тока в допустимых пределах. Релейный регулятор тока состоит из двух блоков (рис. 6.12) - выбора режимов коммутатора (БРК) и управления ключами коммутатора (БУК). Входной аналоговый сигнал Аи = изт - идт преобразуется блоком БРК в два логических сигнала - щ, соответствующий режимам Р2 для ПВ и РО для ЛВ, и и2, соответствующий режимам РО для ПВ и Р2 для ЛВ. Выходной логический блок БУК преобразует сигналы «, и и2 с учетом заданного направления вращения в два выходных управляющих сигнала ыу1 и иу2. Алгоритм работы РРТ представлен в виде табл. 6.1. Диаграмма отработки контуром тока задания на ток изл представлена на рис. 6.13. Быстродействие контура тока с РРТ можно приближенно оценить по минимальному периоду отработки циклового задания на ток 7к.т1шп ~ 2(ximin + Т, + Т0 + Тдт), где т0- время задержки при переключении направления вращения, мс; тдт - временная задержка сигнала датчика тока, мс. РРТ лвпв "РС "з.т БРК (Р2ПВ; РОЛВ) (РОПВ; Р2ЛВ) БУК hi "ДТ "к01 "к02 Рис. 6.12. Схема релейного регулятора тока Таблица 6.1 Алгоритм работы релейного регулятора тока
Если принять xlrnin = 0,3 мс, т, = т0 = тдт = 1 мс (эти значения приемлемы для аналогового выполнения РРТ), то частотная полоса пропускания контура тока составит "дт 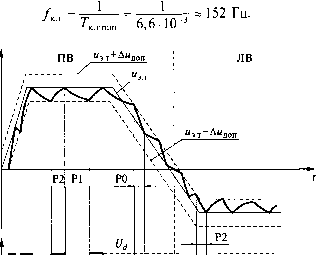 t -и, Рис. 6.13. Диаграммы измерения напряжения датчика тока и линейного напряжения автономного инвертора "PC ("з.т) 1/ о.т 1+Тсрр ~1 .{-ГП ?. Рис. 6.14. Структурная схема двухконтурного электропривода с вентильным двигателем Можно сделать вывод, что контур тока с релейным регулятором по динамике близок к безынерционному звену. С учетом небольшой постоянной времени фильтра Гф в цепи датчика тока передаточная функция замкнутого контура тока будет иметь вид 1 WKT(P) ТфР + V (6.24) где Тф« 1,0... 1,5 мс. При постоянном токе инвертора 7 = изт/кот = const момент двигателя, имеющий пульсации на каждом обороте ротора, в среднем остается постоянным и равным рп1дм/в, поскольку средняя величина 1д пропорциональна току инвертора I. Механическая характеристика двигателя представляет собой вертикальную линию в пределах, ограниченных напряжением питания инвертора. Контур регулирования тока входит в состав контура регулирования скорости, в котором может использоваться типовой П- или ПИ-регулятор скорости. С учетом полученной передаточной функции (6.24) может быть построена приближенная линеаризованная и не учитывающая ЭДС двигателя структурная схема двухконтурного электропривода с ВД (рис. 6.14). Настраивая контур скорости на модульный оптимум, согласно структурной схеме и выражению (5.72) получаем передаточный коэффициент П-РС: к?с - ОТ к г (6.25) где Т - сумма постоянных времени фильтров датчиков тока и скорости, с (7"ц= 7ф) + Тф2); см - коэффициент пропорциональности между моментом двигателя и током инвертора. Определяя кот по допустимому току /доп или моменту Маоп, , з.ттах РСтах-м °-Т ~ I ~ М ПИ-РС 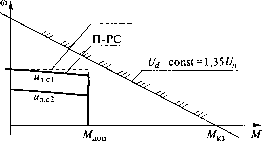 Рис. 6.15. Механические характеристики двухконтурного электропривода с вентильным двигателем получаем fJ "РСнасу/- ~/-ч к* = щ;м>(6-26) где "рснас- напряжение насыщения регулятора скорости, В; ктг - передаточный коэффициент тахогенератора, В с/рад (ктг = кос). При настройке контура скорости на симметричный оптимум получаем согласно выражению (5.75) передаточную функцию ПИ-РС Wvc{p) = ktc--.(6.27) Если Гц«2 мс, полоса пропускания замкнутого контура скорости при П-РС сопп = -Д- « 353 с", при ПИ-РС сопп = ~ 250 с"1. Механические характеристики двухконтурного электропривода с ВД показаны на рис. 6.15. 6.1.3. Система управления электропривода с двухфазным вентильным двигателем Из многофазных ВД двухфазные наиболее просты в конструктивном отношении. Однако у таких двигателей наблюдаются наибольшие пульсации момента - четыре полуволны на оборот ротора. Эти пульсации могут существенно искажать технологический режим движения рабочего органа при больших диапазонах регулирования скорости. Устранить пульсации момента можно, если соответствующим образом управлять токами фаз на каждом интервале угла АО = 2к/т, где т - число тактов инвертора. Это позволит получить бесколлекторный двигатель постоянного тока с неизменным моментом на каждом угловом интервале, т. е. двигатель теоретически с бесконечным числом коллекторных пластин. Алгоритм управления токами фаз /а и /р находится из условия постоянства момента двигателя М = \\>Jq, которое соответствует постоянству пространственного вектора тока на каждом интервале коммутации инвертора при вращении ротора: (6.28) -/„ sin 0 + /р cos 0 = const. С учетом заданного угла смещения коммутации AipK условие (6.28) будет выполняться при управлении токами /„ и /р по следующим законам: „ =-Jm sin(0 + AcpK); р = Jm COS(0 +Дфк). Тогда при заданных значениях 1„, и Дфк Iq = Iт со5Афк = const; М = Мт созАфк = const. (6.29) (6.30) (6.31) (6.32) Схема двухконтурного электропривода с двухфазным ВД - бесконтактным двигателем постоянного тока - дана на рис. 6.16, а. РС г* ФП2 БП2 111 УИТ2
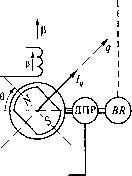 "дпр-дпрб 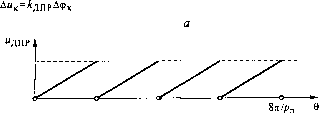 2п/ра Ак1рп6к/рп б Рис. 6.16. Схема электропривода с двухфазным вентильным двигателем (а) и выходное напряжение датчика положения ротора (б) 0 ... 25 26 27 28 29 30 31 ... 49 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












