Раздел: Документация
0 ... 28 29 30 31 32 33 34 ... 49 Разомкнутые системы управления. При невысокой точности и ограниченном диапазоне регулирования скорости АД наиболее целесообразным является его частотное управление в разомкнутой системе электропривода (рис. 6.25). В подобных системах частота f и напряжение питания £/, АД формируются пропорционально напряжению управления иу в преобразователе частоты (ПЧ) на базе автономного инвертора напряжения. Для компенсации падения напряжения во внутренних сопротивлениях ПЧ и возможных колебаний напряжения его питающей сети в преобразователях частоты как источниках напряжения принято использовать внутренние контуры стабилизации выходного напряжения. Для сохранения постоянства перегрузочной способности АД по моменту в функциональном преобразователе (ФП) предусматривается такое соотношение между напряжениями задания частоты ufw напряжения ии на выходе ПЧ, при котором обеспечивается компенсация падения напряжения на активном сопротивлении обмоток статора. Теоретически это соотношение характеризуется нелинейной функцией, когда ии снижается в меньшей степени, чем uf. Для большинства серийных преобразователей частоты эта функция линеаризуется путем выбора в статической характеристике ФП двух базовых координат - ииХ при ип и и0при uf= 0 (см. рис. 6.25). Первая координата определяет задание минимального значения частоты f и соответствующего ему напряжения {/, на выходе ПЧ, при которых еще сохраняется равенство соотношений C/j/yj = = ном/Уыом- Для АД общего назначения при диапазоне регулирования скорости в разомкнутой системе частотного управления до (8... 10): 1 значение минимальной частоты практически выбирается в пределах (0,3 ...0,4) flmu. Вторая координата выбирается с учетом уменьшения теплоот-вода заторможенного двигателя (в режиме динамического торможения) из следующих условий ограничения тока статора на уровне: (0,7...0,8) /1ном.  0 "я "/ Рис. 6.25. Функциональная схема разомкнутой системы ПЧ-АД Это соответствует установке выходного напряжения преобразователя частоты при ил = 0 на уровне С/, s (0,7 ...0,8) I]H0MR]t где Rx - активное сопротивление статорной обмотки АД. Реально наименьшее значение выходной частоты преобразователя и соответствующее ему значение ufX полезно выбирать из условия yjmin = соономАА/2я, при котором пусковой момент АД будет близок моменту сил сопротивления на валу двигателя. Здесь sc - скольжение АД при его статической нагрузке. При подобном выборе зона нечувствительности по сигналу управления скоростью АД будет минимальной и движение электропривода начнется практически одновременно с началом увеличения сигнала управления. При вентиляторной нагрузке на валу АД, для которой Мс = со2, соотношение между щ и ии должно обеспечивать закон управления, близкий к постоянству UJfx [14]. На рис. 6.25 это соотношение отражено в ФП штриховой линией. Начальные значения частоты и напряжения на выходе ПЧ, которые выбираются из тех же соображений, что и при Мс = const, будут при этом заметно меньше за счет меньших значений пусковых моментов. При регулировании скорости АД выше номинальной для привода механизмов, имеющих в данном диапазоне скоростей постоянную мощность нагрузки, напряжение питания АД сохраняется равным номинальному значению. При этом допустимый момент АД убывает в первом приближении обратно пропорционально увеличению частоты, а перегрузочная способность АД по моменту уменьшается обратно пропорционально частоте. Для ограничения токов и моментов АД при его пуске принято ограничивать темп изменения напряжения управления ыу за счет включения в цепь управления задатчика интенсивности. В статическом режиме разомкнутая система частотного управления (см. рис. 6.25) с приведенными выше соотношениями UJfx практически обеспечивает сохранение номинальной перегрузочной способности АД в диапазоне изменения частоты не более (8... 10): 1 при постоянной нагрузке и (10...25): 1 - при вентиляторной [14]. При сохранении же заданной точности регулирования скорости АД диапазон ее регулирования в разомкнутой системе частотного управления значительно меньше, при постоянной нагрузке и точности регулирования 10% он не превышает диапазона 3:1. Недостатком разомкнутой системы частотного управления является и отсутствие ограничений переменных электропривода (моментов, токов, напряжений) при возможных перегрузках со стороны рабочего механизма или отклонениях напряжения питающей сети. Замкнутые системы частотного управления. Формирование требуемых статических и динамических свойств асинхронного частотно-регулируемого электропривода возможно лишь в замкнутой 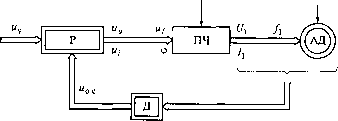 Рис. 6.26. Функциональная схема замкнутой системы ПЧ-АД со скалярным управлением системе регулирования его координат. Обобщенная функциональная схема подобной системы (рис. 6.26) кроме АД и управляемого преобразователя частоты (ПЧ) содержит регуляторы Р и датчики Д переменных электропривода. Управляющими воздействиями иу на входе регуляторов могут быть сигналы задания любых координат электропривода - скорости, угла поворота ротора АД, тока статора, магнитного потока и т. п. Возмущающими воздействиями на электропривод могут быть моменты сил сопротивления Мс на валу АД или колебания напряжения питающей электропривод сети Uc. Входными сигналами датчиков являются переменные АД, доступные для непосредственного их измерения (частота, напряжение и ток статора, скорость ротора, магнитный поток в воздушном зазоре АД) или определяемые расчетным путем с помощью математической модели АД (ЭДС, потокосцепления статора, ротора и т.п.). Выходные сигналы регуляторов, зависящие от управляющих воздействий, сигналов обратных связей иос и принятых алгоритмов регулирования, являются сигналами управления частотой uf, выходным напряжением ии и током и, преобразователя частоты. Рассмотрим примеры замкнутых систем скалярного управления, наиболее распространенных в промышленных электроприводах. Вариант функциональной схемы системы частотного управления АД с обратной связью по току статора представлен на рис. 6.27. Здесь сигналы isan isc, пропорциональные мгновенным значениям токов фаз А и С обмоток статора, с выхода датчиков тока ДТа и ДТС поступают в функциональный преобразователь тока ФТ, где формируются выходные сигналы /, и /а, пропорциональные соответственно действующему значению тока статора и активной составляющей этого тока. В узлах Z, и Х2 суммируются сигналы управления и обратных связей, поступающие с функциональных устройств Al, А2 и A3. Устройство А4 обеспечивает прохождение сигнала /, на вход A3 лишь при его превышении на i 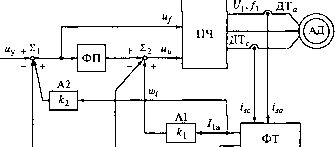 A3 А4 Ii -1 I I £3 + Дтах Рис. 6.27. Функциональная схема системы ПЧ -АД с обратной связью по току статора сумматоре Z3 сигнала /1тах, пропорционального действующему значению максимально допустимого тока статора АД. Назначение каждого из контуров обратных связей и их влияние на свойство электропривода целесообразно рассмотреть в отдельности. Так, при действии лишь положительной обратной связи по току со стороны А1 по мере увеличения момента статической нагрузки АД и соответствующего увеличения тока статора на вход сумматора Е2 поступает дополнительный сигнал щ, увеличивающий сигнал ии В итоге по мере увеличения тока статора увеличивается и выходное напряжение ПЧ. При этом его выходная частота, определяемая сигналом ufi остается постоянной. Повышение напряжения на обмотках статора АД способствует компенсации падения напряжения на полном их сопротивлении и, в результате, увеличению потока намагничивания АД. Степень компенсации определяется коэффициентом усиления /с, цепи положительной обратной связи по току. Очевидно, чем больше кх, тем больше будет поток при том же абсолютном скольжении. Предел увеличения кх определяется условиями устойчивости замкнутой системы управления и допустимыми значениями потока намагничивания и напряжения питания АД. По мере снижения частоты питания полное сопротивление цепи намагничивания и, следовательно, падение напряжения в статоре АД уменьшаются. Поэтому для стабилизации и ограничения потока намагничивания в замкнутой по полному току системе степень компенсации падения напряжения, т.е. коэффициент ки надо уменьшать по мере снижения частоты выходного напряжения ПЧ. Подобный недостаток отсутствует при использовании обратной связи по активной составляющей тока статора. Если в каче- стве сигнала обратной связи принять активную составляющую тока статора, как показано на рис. 6.27, то постоянство потокосцепления статора будет сохраняться при неизменном коэффициенте к{. При частотном управлении АД с подобной обратной связью по току возможна реализация механических характеристик электропривода с повышенной перегрузочной способностью по моменту и жесткостью, близкой к естественной лишь в небольшом диапазоне регулирования скорости. Влияние положительной обратной связи по току со стороны устройства А2 связано с одновременным воздействием на выходные частоту и напряжение ПЧ. За счет одновременного их увеличения при росте нагрузки на валу АД соответственно увеличивается скорость идеального холостого хода АД, обеспечивая тем самым стабилизацию его скорости, и сохраняется постоянство перегрузочной способности АД по моменту. Увеличение коэффициента усиления к2 устройства А2, способствующее повышению жесткости механической характеристики АД, ограничено условиями устойчивости замкнутой системы управления и допустимыми значениями частоты и напряжения питания АД. Совокупность положительных обратных связей по току с использованием устройств А1 и А2 за счет стабилизации скорости последними позволяет заметно повысить жесткость механических характеристик АД и при постоянной статической нагрузке увеличить диапазон регулирования скорости вниз от номинальной до 10:1[14]. Достоинство подобных систем заключается в отсутствии тахогенератора на валу АД. Для защиты преобразователя частоты и двигателя от перегрузок по току используется режим токовой отсечки с помощью сумматора ]Г3 и устройства А4 (см. рис. 6.27). При /, > /1тахна вход ПИ-регулятора тока отсечки A3 поступает сигнал превышения тока статора выше допустимого. Выходной сигнал A3 иотс может воздействовать как на уменьшение выходного напряжения ПЧ (узел Ег), так и одновременно на уменьшение частоты питания АД (узел I,). При воздействии только на выходное напряжение преобразователя, при условии, что регулятор A3 имеет интегральный канал регулирования, за счет отрицательной обратной связи по току преобразователь ПЧ из источника напряжения переходит в режим источника тока. Тогда при постоянстве тока статора АД за счет большего коэффициента обратной связи регулятора A3 (для ПИ-регулятора - бесконечно большого), чем устройства А1, при снижении скорости будут уменьшаться поток и момент двигателя, вызывая опрокидывание механической характеристики АД. Подобный режим работы отсечки используется лишь совместно с одновременным воздействием на выходную частоту преобразователя. За счет поступающего на сумматор Е, сигнала отрицательной обратной связи по току статора (более сильного, чем со стороны устройства А2) совместно со стабилизацией тока осуществляется снижение его частоты и, следовательно, скорости идеального холостого хода АД. Тем самым обеспечивается постоянство магнитного потока, абсолютного скольжения и, в итоге, момента двигателя. Однако статическая и динамическая точности стабилизации указанных переменных ограничены условиями устойчивости замкнутых контуров регулирования. Увеличение диапазона регулирования по скорости АД можно получить за счет введения в рассмотренную систему управления отрицательной обратной связи по скорости. Функциональная схема подобной системы при питании от ПЧ как источника напряжения приведена на рис. 6.28. Здесь канал отрицательной обратной связи по скорости включает в себя тахогенератор ТГ как датчик обратной связи, узел Es суммирования напряжений управления скоростью АД иу и обратной отрицательной связи по скорости иос, регулятор абсолютного скольжения А5, блок БО ограничения его выходного напряжения ыРС, а также узел Е4 суммирования напряжения ыРС и результирующего напряжения иу1 с выхода сумматора Е,. По мере увеличения нагрузки на валу АД (от момента М{ до момента М2на рис. 6.29) за счет уменьшения скорости АД и, следовательно, сигнала иох увеличивается сигнал рассогласования 5S = иу - и0 с = со00 - со = sa, пропорциональный абсолютному скольжению двигателя. Здесь со00 - заданная скорость идеального холостого хода АД, соответствующая исходному сигналу управления иу\ 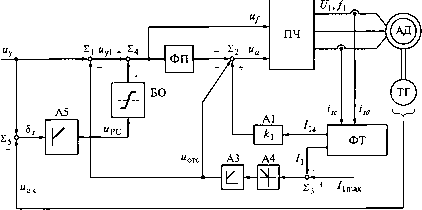 Рис. 6.28. Функциональная схема системы ПЧ -АД с обратной связью по скорости 0 ... 28 29 30 31 32 33 34 ... 49 |












