Раздел: Документация
0 ... 30 31 32 33 34 35 36 ... 49 возрастает сигнал задания частоты, ток статора становится переменным с заданной частотой и двигатель начинает вращение под действием максимального момента, установленного сигналом изс Увеличение скорости будет происходить до тех пор, пока не сравняются сигналы задания и обратной связи по скорости двигателя. После этого выходной сигнал РС при отсутствии статической нагрузки на валу АД вновь установится равным нулю, но за счет положительной обратной связи по скорости уже при u3f ф 0. Поток холостого хода АД будет при этом создаваться переменным током 7lmin (см. рис. 6.32). Для построения структурной схемы электропривода, показанного на рис. 6.33, определим передаточные функции его отдельных звеньев и условия, при которых момент АД будет однозначно зависеть от абсолютного скольжения. Передаточная функция между заданной скоростью идеального холостого хода АД со0з и сигналом задания частоты на входе ПЧТ ы3/ определяется соотношением Wf{p) = Ащ3/Аиз/ = 2nkf/pn,(6.37) где kf- передаточный коэффициент ПЧТ, kf = Af3/Au3f=fHOM/u3fUOlA. В соответствии с рис. 6.33 Аиз/ = кзч(кФЧСАиРС + ксук0САы),(6.38) где кзч, кфцС, ксу, кос - передаточные коэффициенты устройств 34, ФЧС, СУ и цепи обратной связи по скорости АД; кзч = = Д«з Аы3с; кфчс = ДИфЧС/Ди3с; кСу = Аису/Аиос; кос = Д«ос/Дсо. При питании АД от источника тока его передаточная функция относительно изменений электромагнитного момента и разности изменений заданной скорости идеального холостого хода и текущего значения скорости WM(p) = АМ/(Ащ3 - Дсо) = рт/(7;.т/> +1). Здесь Вт - жесткость механической характеристики, определяемая по формуле рт = 2Л/1Сл./(со0ном5к.т)> гДе Л/К.т и 5к.т - соответственно критический момент и критическое скольжение АД при питании его от источника тока; Тзт - эквивалентная электромагнитная постоянная времени, определяемая по формуле Тэт = 1/со0эл Н0М5КТ. Критическое скольжение АД при питании от источника тока sKT = = Rj/ix + х2н)> гДе *цН> х2н и ~~ соответственно индуктивное сопротивление цепи намагничивания, индуктивное и активное сопротивления обмотки ротора, приведенные к цепи статора АД при со0ном. Поскольку критическое скольжение АД при питании от источника тока заметно меньше, чем при питании от источника напряжения С?к» 5КТ), то, следовательно, В«; рт, Тэ «; Тэт. Физически это связано с заметным изменением магнитного потока АД при изменении его нагрузки и, соответственно, большей инерционностью электромеханического преобразования энергии в АД при его питании от источника тока. С учетом выражений (6.37), (6.38) можно записать (Дсо0з - Дсо) = (2nkj-/pn)k34(k04CAuPC + ксукосАа>) - Дсо = = (2nkf/pn)k34k04CAuPC + (2пк р11)ксук01.А(£, - Дсо. Тогда при выборе передаточных коэффициентов функциональных устройств электропривода из условия (2nkf/pn)kcykoc = 1 получим (Дсооз - Дсо) = £мД"рс, где км = (2nkf/pn)k34k04C. Отсюда передаточная функция АД между изменением электромагнитного момента АД и изменением сигнала на выходе РС Wu (р) = АМ/АиРС = £мВт/(Тэтр + 1).(6.39) Соответствующая выражению (6.39) структурная схема линеаризованной системы с частотно-токовым управлением представлена на рис. 6.34. Здесь Тит - электромеханическая постоянная времени АД при питании от источника тока (Тмт = Вт). Передаточная функция регулятора скорости WPC(p) = ДмрС/Дыу. Результирующая передаточная функция объекта регулирования, включающего ПЧТ и АД, W0(p) = Дсо/Дмрс = км/[(Тэтр+1)Тмтр]. Если отнести постоянную Гэт к малой некомпенсируемой постоянной времени, т.е. 7J, = Гэт, то при настройке электропривода на модульный оптимум передаточная функция РС Ирс(/>) = Тмл/(арТ„к0.скы) = к, ч>с- Ди, Ди„ Ди„ РС ТрсР Аи PC АД 1+Тэр ДМ, AM 1 1 Ртм.т/7 Дсо Рис. 6.34. Структурная схема системы ПЧ -АД с частотно-токовым управлением При подобной настройке с пропорциональным PC для приводов малой и средней мощности, а также в связи с тем, что электромеханическая постоянная времени АД при питании от источника тока заметно меньше, чем при питании от источника напряжения, значения кРС получаются небольшими. В итоге результирующая жесткость механической характеристики привода в замкнутой системе невысока. Более высокая точность реализуется при настройке привода на симметричный оптимум с ПИ-регуля-тором скорости. При этом постоянная времени интегрирования и коэффициент передачи пропорциональной части регулятора PC определяются так: ГРС = 2aJJk?c\ кРС = TMJ(akMk0C). Механические характеристики электропривода по схеме, показанной на рис. 6.33, подобны характеристикам электропривода постоянного тока с двухконтурной системой подчиненного регулирования тока и скорости (см. рис. 5.20). 6.2.3. Системы векторного управления частотно-регулируемого асинхронного электропривода Понятия векторного управления [1, 8, 13]. Векторное управление частотно-регулируемого асинхронного электропривода связано как с изменением частоты и текущих значений переменных АД, так и со взаимной ориентацией их векторов в полярной или декартовой системе координат. За счет регулирования амплитудных значений переменных и углов между их векторами обеспечивается полное управление АД как в статике, так и в динамике, что дает заметное улучшение качества переходных процессов по сравнению со скалярным управлением. Именно этот факт и является определяющим при выборе систем с векторным управлением. Информация о текущих значениях и пространственном положении векторов переменных АД может быть получена как прямым их измерением с помощью соответствующих датчиков, так и косвенно на основе математической модели АД. Конфигурация и сложность такой модели определяются техническими требованиями к электроприводу. В общем случае подобные системы с косвенным регулированием координат электропривода из-за нестабильности параметров АД и сложной их взаимосвязи уступают по своим статическим и динамическим показателям системам с прямым векторным управлением. При сложности вычислительных операций и алгоритмов управления электроприводом достоинство систем с косвенным регулированием заключается в простоте технических решений и, следовательно, в практической надежности. При векторном управлении АД может питаться как от источника напряжения, так и от источника тока. Вариант частотно-токового векторного управления является наиболее распространенным, поскольку при регулировании тока независимо от частоты питания АД обеспечивается регулирование и его момента. Это не только упрощает схему управления, но и одновременно ограничивает перегрев двигателя. При этом напряжения на обмотках статора АД устанавливаются автоматически в зависимости от его режима работы. К числу основных допущений при математическом описании электромагнитных процессов в АД принято относить: синусоидальность распределения намагничивающих сил обмоток двигателя вдоль окружности воздушного зазора; отсутствие потерь в стали статора и ротора; симметричность сдвига осей обмоток статора и ротора на 120°; отсутствие насыщения магнитной цепи двигателя. Подобные допущения и переход от трехфазной модели двигателя к эквивалентной ей двухфазной, когда текущие переменные статора и ротора заменяются их проекциями на взаимно перпендикулярные оси координат х, у, вращающиеся с синхронной скоростью магнитного поля двигателя, существенно упрощают математическую модель двигателя и позволяют на ее основе создавать системы векторного управления с подчиненным регулированием координат аналогично электроприводам постоянного тока. В наиболее общем случае система векторного управления асинхронным электроприводом должна решать задачи регулирования и стабилизации момента и скорости двигателя. Момент АД формируется за счет воздействий на абсолютные значения векторов потокосцепления статора *Р,, основного потокосцепления ХРМ, потокосцепления ротора токов статора /] и ротора Г2, а также фазовых сдвигов между ними. От того, какие векторы выбраны в качестве регулируемых, зависят принцип построения и техническая реализация систем управления электроприводом. Если при определении момента воспользоваться выражением = лрцх71],(6.40) то в качестве регулируемых будут выбраны векторы "f,, и 7Х. Их векторные диаграммы при ориентации по вектору потокосцепления оси х системы координат х, у, вращающейся с синхронной скоростью поля двигателя, представлены на рис. 6.35, г. Здесь же показаны векторы токов намагничивания 1, ротора Г2 и проекции векторов тока статора и ротора на оси х, у, а также на оси а, Р неподвижной системы координат, связанной со статором АД. Анализ рис. 6.35, а позволяет интерпретировать АД как эквивалентную машину постоянного тока. Если ротор АД сопоставить яко- 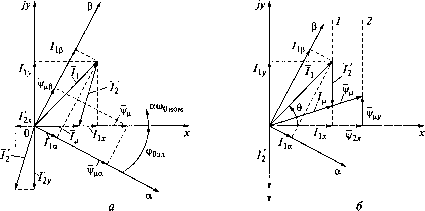 Рис. 6.35. Векторные диаграммы переменных АД при ориентации системы координат х, у по основному потокосцеплению (а) и по потоко- сцеплению ротора (б) рю двигателя постоянного тока (ДПТ), а статорные обмотки - обмоткам возбуждения ДПТ, то составляющая тока статора 1Хх, синфазная потокосцеплению Ч, может интерпретироваться как ток возбуждения ДПТ, составляющая 1Ху - как ток его компенсационной обмотки, составляющая Г2у - как поперечная составляющая поля якоря ДПТ, составляющая - как размагничивающая продольная реакция якоря. Из рис. 6.35, о видно, что потокосцепление определяется током /ц = 1Х + 12. Следовательно, в системе координат х, у, связанной с вектором потокосцепления vj/j,, составляющие 11у и Г2у равны и имеют разные знаки, а встречно направленные составляющие 1Ххи Г2х определяют модуль потокосцепления *РМ = Ц2{1\х + 12х), где Ьх2 - взаимная индуктивность обмоток статора и ротора АД. В приведенной интерпретации отличительные особенности АД от ДПТ состоят в том, что на статоре АД нет отдельных обмоток, эквивалентных обмотке возбуждения и обмотке, компенсирующей поперечную реакцию якоря (указанные обмотки как бы совмещены в одной обмотке статора), а ось х, связанная с вектором потокосцепления Ч, вращается относительно статора со скоростью асооном, где а = fx/fXmu - относительная частота напряжения питания статора АД; со0ном = 2к/Хпоы/рп - синхронная угловая скорость вращения магнитного поля при номинальной частоте напряжения питания flH0M и числе пар полюсов рп статора АД. Особенности формирования момента в соответствии с выражением (6.40) определяют основные положения при технической реализации системы векторного управления АД. Так, вектор Ч может быть определен по его проекциям Ч и Чр на оси аир (см. рис. 6.35, а): Чг = Ч + Ч,р. Каждая из составляющих может быть непосредственно измерена с помощью датчиков Холла, установленных в воздушном зазоре между статором и ротором АД. При этом модуль потокосцепления ч/ц = /ч + Чр, а угол между осями а, р неподвижной системы координат и осями х, у системы координат, вращающейся со скоростью асо0ном, Ф0эл= arccos (4/141). Составляющие вектора Т{ в системе координат а, р при условии инвариантности мощности АД в двухфазной и трехфазной системах координат могут быть определены через токи фаз стато-Ра l\Ai Лв> ho ho.= jI\a> hp = у21В ~hc)- При том же условии составляющие вектора тока в системе координат х, у hx = 1аСО8ф0эл +/lpsin903JI; ггг(6.41) hy = -Ла 51пФ0эл + hp СО5ф0эл. Составляющие Т1х и 11у не зависят от частоты питания АД и по своей форме являются постоянными. С учетом этого система векторного управления может строиться аналогично системам управления двигателями постоянного тока, в которых составляющая 1Хх тока статора определяет потокосцепление уц АД (магнитный поток ДПТ), а составляющая 1Ху является моментной составляющей тока статора (подобна току якоря ДПТ). Таким образом, система векторного управления с опорным вектором потокосцепления ЧУЙ должна иметь два канала управления - модулем \/ци угловой скоростью ротора АД. По аналогии с ДПТ канал управления скоростью должен содержать внутренний контур управления составляющей тока статора 1Ху, эквивалентной току якоря ДПТ, и внешний контур управления угловой скоростью ротора. Канал управления модулем потокосцепления должен содержать контур управления составляющей тока статора 11х, эквивалентной току возбуждения ДПТ. Хотя по своей функции этот канал и подобен каналу управления магнитным потоком ДПТ, он более сложен, поскольку взаимосвязь модуля \/ составляющих тока и напряжения статора по оси х характеризуется дифференциальными уравнениями второго порядка. На этот канал оказывает влияние и составляющая тока статора 1Ху в виде трансформаторных ЭДС, пропорциональных рассеяниям статора и ротора. Важной особенностью системы управления с опорным вектором потокосцепления Ч является возможность его прямого измерения с помощью датчиков, установленных в воздушном зазоре АД. Подобные системы имеют более высокие показатели качества 0 ... 30 31 32 33 34 35 36 ... 49 |












