Раздел: Документация
0 ... 32 33 34 35 36 37 38 ... 49 ющие IXx, 7,j,тока статора. Связь между статором и ротором характеризуется их взаимной индуктивностью Ln. Входными переменными роторной цепи являются составляющие взаимного потокосцепления Lx2IXx, Lx2IXy и скорость со, а выходной переменной - потокосцепление ротора 4>2х. Составляющая Lx2IXy/T2 = k2R2IXy, пропорциональная падению напряжения на активном сопротивлении ротора, после деления на его потокосцепление Ч7 преобразуется в сигнал, пропорциональный скольжению 5 двигателя: (ЮОэл - А») == Оэл-(б-58) Суммируясь с р„а, этот сигнал формирует задание синхронной скорости со0эл Система управления с прямой ориентацией по вектору потокосцепления ротора АД. Функциональная схема системы регулирования скорости АД при питании его от преобразователя частоты (ПЧ) на основе автономного инвертора напряжения с управлением по вектору потокосцепления ротора двигателя представлена на рис. 6.37. Подобная система векторного управления (система Transvektor) впервые была предложена фирмой Siemens (ФРГ). Система имеет два внешних контура регулирования - модуля вектора потокосцепления ротора Ч721 и угловой скорости со двигателя, а также два подчиненных им внутренних контура регулирования составляющих тока статора 1Ххи 1Ху в осях х и у ортогональной системы координат, вращающейся с синхронной скоростью со0эл поля двигателя. Система осуществляет независимое регулирование модуля вектора потокосцепления ротора и скорости ротора при сохранении прямой пропорциональности между моментом двигателя и составляющей намагничивающей силы статора, перпендикулярной вектору потокосцепления ротора. Сигнал задания потокосцепления ротора \ ¥2\3 формируется в специальном вычислительном устройстве ВУ, использующем математическую модель АД и вводимые в нее реальные параметры двигателя: активные и реактивные сопротивления цепей статора и ротора, число пар полюсов, номинальные значения мощности, скорости, напряжения и тока статора, их частоты, КПД и мощности. На рис. 6.37 вводимые параметры двигателя условно изображены в виде совокупности внешних сигналов Хън на входе ВУ. Внешний сигнал задания скорости двигателя со3 подается на вход за-датчика интенсивности ЗИ, формирующего темп изменения скорости двигателя в соответствии с требуемыми технологическими ограничениями. Измерение текущих значений скорости, потокосцепления ротора и токов статора АД производится с помощью датчиков скорости (тахогенератор ТГ), потока (ДП) и тока (ДТ). 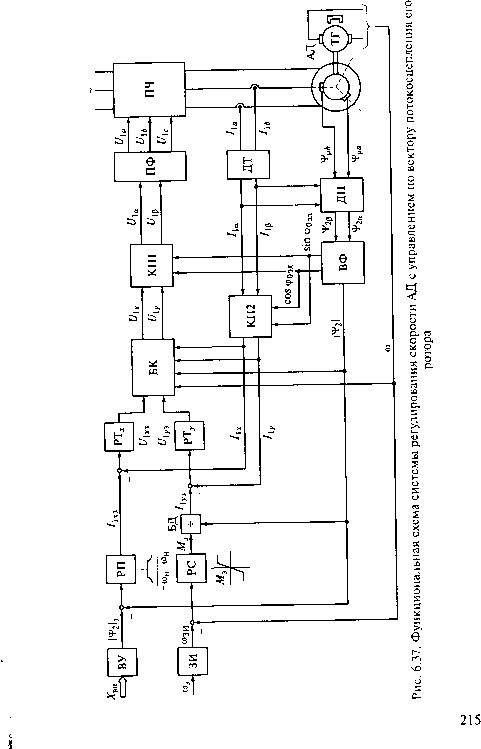 Датчик потока преобразует измеренные с помощью датчиков Холла трехфазные мгновенные значения потокосцеплений в воздушном зазоре 4% 4% в составляющие потока Ч, ЧУцРв осях а, В ортогональной системы координат, жестко связанной с неподвижным статором двигателя, причем ось а совмещается с магнитной осью статорной обмотки фазы А. Указанные составляющие определяются следующими выражениями: ,a=j; 4VP=V24v + 4vj.(6.59) Кроме того, в ДП осуществляется вычисление составляющих потокосцепления ротора согласно выражениям 2а =~"¥,а-(Ц-Цг)11а\ У2р =f-№-ЦгЩ- Датчик тока измеряет мгновенные значения фазных токов статора I]a, 1хьи аналогично датчику потока преобразует их в двухфазную систему переменных 1Ха, /1р. Преобразование переменных АД, приведенных в неподвижной системе координат а, р, в переменные системы координат х, у, связанной с потокосцеплением ротора и вращающейся со скоростью со0эл осуществляется вектор-фильтром ВФ и координатным преобразователем КП1. Вектор-фильтр выделяет модуль вектора потокосцепления ротора и тригонометрические функции COS фо эл = 2а/1 2 I ; Sin ф0 эл = Y2p/1 ¥2 , где ф0эл - электрический угол поворота ротора относительно статора в осях х, у (Фоэл= со Оэл0- Преобразователь КП2 осуществляет поворот вектора намагничивающей силы статора на угол ф0эл в соответствии с выражениями (6.41), в которые входят составляющие тока статора по осям х, у вращающейся системы координат. Поскольку вектор потокосцепления ротора в системе координат х, у совмещен с осью х, т.е. т2 = х¥2х, Ч2у = 0, то составляющая тока 1Хх определяет магнитный поток двигателя, что по аналогии с двигателем постоянного тока сравнимо с действием тока в цепи его обмотки возбуждения. При этом составляющая тока /, подобно току в якорной цепи двигателя постоянного тока определяет электромагнитный момент двигателя. Задание на электромагнитный момент двигателя формируется выходным сигналом регулятора скорости РС, на входе которого сравниваются сигнал задания скорости сози с выхода ЗИ и сигнал, пропорциональный текущей скорости со двигателя. Ограни- чение выходного сигнала РС обеспечивает ограничение задания максимальных значений электромагнитного момента АД. Для поддержания постоянства электромагнитного момента при изменениях модуля потокосцепления ротора введен в соответствии с выражением (6.57) блок деления (БД) сигнала с выхода регулятора скорости на I Ч/2. На выходе блока деления формируется сигнал задания 1Хуз составляющей тока статора по оси у (1Ху). Сигнал задания 11хз составляющей тока статора по оси х (1Хх) формируется на выходе регулятора потока РП, на входе которого сравниваются сигналы задания и реальные значения модуля потокосцепления ротора. Сигналы задания 1Ххз и /,,3 сравниваются с текущими составляющими токов статора 11хи 1Ху на входах регуляторов тока соответственно РТХ и РТЯ выходные сигналы которых определяют задания составляющих напряжений статора Uix3 и UXy3 в системе координат х, у. Если в системе дифференциальных уравнений (6.52) выполнить компенсацию составляющих Е1х и ЕХу, исключив влияние блока Э, показанного на рис. 6.36, то без их учета подобно электроприводам постоянного тока U]x(p) = /чэ(1 + Тър)1Хх(р)\66()) UXy(p) = RX3{l + Tl3p)IXy{p). На рис. 6.37 роль указанной компенсации выполняет блок БК, в который вводятся переменные IXx, 1{у, IЧУ21, со0эл, со и где производятся соответствующие функциональные преобразования. Преобразование составляющих напряжения статора UXx, UXyc выхода БК в составляющие Ula, с71р в осях a, р осуществляется блоком координатных преобразований КП1 в соответствии с выражениями UXa = с71хсо5ф0эл- иХу&тц>0эл; С71р = UXxsmy03Jl + 1/Хусо5щэл. В преобразователе фаз ПФ в соответствии с выражениями [14] UXa=UXa; U]b=-(-U]a+Ux,); ии =±(-±Ula-Uv) формируются трехфазные синусоидальные сигналы UXa, Uxb, UXc, определяющие на выходе преобразователя частоты амплитуду и частоту напряжений UA, UB, Uc питания обмоток статора двигателя. Передаточная функция преобразователя частоты по напряжению совместно с блоками преобразования координат Wm(p) = UXx(j>)/UXx3{p) = Uiy(p)/UX}M = кп /(Т„р + 1), где &п - эквивалентный статический коэффициент передачи между составляющими напряжений UXx3, UXy3 управления преобразователем и составляющими в осях х, у выходных напряжений преобра-  зователя Uix Uiv; Тп - эквивалентная постоянная времени цепи управления преобразователем. Тогда передаточные функции между составляющими напряжений UlX3, Ulyi и токов Ilx, 11у статора 1\Лр) К1 UXxi(р) Тпр + \ Л]э(Г1э/> + 1) / (D) к1<661) Щ UXy,{p) TnP + lRb(T]3p + l) Обобщенная линеаризованная структурная схема электропривода, показанного на рис. 6.37, с учетом выражений (6.56), (6.57), (6.61) приведена на рис. 6.38. Схема содержит два одинаковых по параметрам внутренних контура регулирования составляющих Iix, Ily тока статора с коэффициентом обратной связи по току кот, внешний контур регулирования потокосцепления ротора с коэффициентом обратной связи по потокосцеплению коп и внешний контур регулирования скорости двигателя с коэффициентом обратной связи по скорости кос. Данная схема подобна структурной схеме системы двухзонного регулирования скорости двигателя постоянного тока. Поэтому при настройке контуров регулирования на модульный оптимум определение параметров передаточных функций регуляторов тока W?J(p), потокосцепления W?n(p) и скорости WPC (р) выполняется аналогично: rVyr(p) = kPr+--; Wm(p) = km+~-; WPC(p) = kPC, *игРГ».ПР где кРТ - передаточный коэффициент пропорциональной части регулятора тока, кРТ = Т1э/Ти1; Ти1 - постоянная времени к к интегрирования ПИ-регулятора тока, ТК[ = °рт " агТа ; кРП - -"la передаточный коэффициент пропорциональной части регулятора потокосцепления ротора, кРП = Т2/Тип; Тип - постоянная времени интегрирования ПИ-регулятора потокосцепления ротора, к L г,„ = 0 2 апа,Тп ; кРС - передаточный коэффициент П-регуля- 2Jk тора скорости, кРС =---. В приведенных формулах ah Зрпк2к0Хааа,Тп ап и аш находятся в диапазоне от 2 до 4. Системы управления с косвенной ориентацией по вектору потокосцепления ротора АД. Установка датчиков магнитного потока в воздушном зазоре АД в системах прямого управления векторами его потокосцеплений требует дополнительных изменений в конструктивных решениях серийно выпускаемых АД и сопровождается снижением надежности электропривода. Поэтому в современных и наиболее совершенных частотно-регулируемых электропри- 0 ... 32 33 34 35 36 37 38 ... 49 |












