Раздел: Документация
0 ... 35 36 37 38 39 40 41 ... 49 7.Определите для электропривода, схема которого показана на рис. 6.18, характер изменения выходного напряжения регулятора скорости, напряжения на статоре двигателя и его скорости в функции момента на валу двигателя при П-рсгуляторе и ПИ-регуляторе скорости. Как они будут отличаться для двигателей с различными значениями номинального скольжения? 8.Нарисуйте механические характеристики электропривода, схема которого показана на рис. 6.18, при П-регуляторе и ПИ-регуляторе скорости и различных значениях первоначально заданной скорости. Определите граничные зоны механических характеристик электропривода. 9.За счет каких обратных связей возможно увеличение жесткости механической характеристики асинхронного частотно-регулируемого электропривода? Дайте сравнительную оценку различным способам стабилизации скорости АД. 10.Определите для электропривода, схема которого показана на рис. 6.27, характер изменения частоты и напряжения на статоре двигателя, а также его скорости в функции момента на валу двигателя. Как указанные переменные будут отличаться у двигателей с различными значениями номинального скольжения? Определите граничные зоны механических характеристик электропривода. 11.Какие факторы ограничивают максимальный коэффициент положительной обратной связи по току статора АД? 12.Определите для электропривода, схема которого показана на рис. 6.28, характер изменения выходного напряжения регулятора скорости, частоты и напряжения на статоре двигателя, а также его скорости в функции момента на валу двигателя (рассмотрите два варианта - с ПИ- и с П-регулятором скорости). Как указанные переменные будут отличаться у двигателей с различными значениями номинального скольжения? Определите граничные зоны механических характеристик электропривода. 13.Какие факторы ограничивают применение разомкнутых систем с частотно-токовым управлением АД? 14.Поясните назначение блоков БО, ФП, ФЧС и СУ в схеме на рис. 6.33. 15.Чем объясняется меньшее значение электромеханической и большее значение электромагнитной постоянных времени АД при питании его от источника тока по сравнению с питанием от источника напряжения? 16.На примере векторной диаграммы основного потокосцепления и тока статора АД покажите общность физических взаимосвязей в двигателе постоянного тока и АД. 17.Укажите особенности построения систем управления с ориентацией системы координат х, у по вектору потокосцепления статора и ротора. 18.Поясните назначение функциональных устройств А1- А12 в схеме на рис. 6.39. 19.Поясните назначение блоков ЭМФ и МТ в схеме на рис. 6.39. 20.Постройте и сравните регулировочные характеристики асинхронного электропривода и диаграммы изменений частоты, напряжения, составляющих тока статора по осям х и у, магнитного потока ротора в функции сигнала управления скоростью АД в системе управления, схема которой показана на рис. 6.39, при отсутствии и наличии статической нагрузки на валу двигателя. 21.Постройте и сравните механические характеристики асинхронного электропривода и диаграммы изменений частоты, напряжения, составляющих тока статора по осям х и у, магнитного потока ротора в функции момента на валу АД в системе управления, схема которой показана на рис. 6.39, при исходных заданных частотах выходного напряжения меньше и больше номинального их значения. 22.Оцените изменение механической характеристики электропривода в системе управления, схема которой показана на рис. 6.39, при вариациях параметров регуляторов скорости, тока, уровней ограничения в блоках Б01, Б02. 23.Укажите достоинства и недостатки систем векторного управления асинхронным электроприводом без датчика скорости. Глава 7 СИСТЕМЫ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЭЛЕКТРОПРИВОДОВ 7.1. Общая характеристика позиционных и следящих электроприводов и их систем управления В отличие от электроприводов со скоростным технологическим режимом работы, в которых внешний входной сигнал системы управления задает значение скорости, в позиционных и следящих электроприводах такой сигнал задает значение перемещения рабочего органа (РО). Позиционный электропривод (ПЭП) перемещает РО из некоторой позиции в некоторую конечную позицию с требуемой точностью остановки в ней. При этом траектория РО заранее известна, а временной закон перемещения РО может быть произвольным или задаваться по условиям работы установки. Режим отработки электроприводом заданного перемещения называется позиционированием. Примерами установок с ПЭП могут служить различные подъемно-транспортные установки, некоторые типы роботов и манипуляторов. Следящий электропривод (СЭП) осуществляет перемещение РО по некоторой траектории с требуемой точностью в любой точке траектории. Определяет траекторию и характер движения по ней некоторый задающий орган (30), которым может быть реально движущийся объект - объект слежения. Таким образом, СЭП своим рабочим органом отслеживает движение 30. Задающим органом могут служить командный валик, поворачиваемый вручную, копировальный палец в копировальных станках, космический объект, отслеживаемый радиотелескопом и т. п. Режим слежения, осуществляемый автоматически по сигналу рассогласования между 30 и РО, называется автосопровождением. Если траектория и скорость движения 30 заранее известны, то задание на движение для СЭП формируется с помощью задающего устройства (ЗУ) в виде программы, которая является в данном случае математическим образом движущегося 30. В общем случае, когда РО должен двигаться по пространственной траектории, для перемещения его центра тяжести требуются три индивидуальных электропривода, действующих по линейным (декартовым х, у, z) или угловым (полярным а, р, р) координатам РО. Если по технологическим условиям РО, перемещаясь в пространстве, должен дополнительно поворачиваться относительно своего центра тяжести, то нужны пять индивидуальных электроприводов для перемещений и поворотов РО. К таким многокоординатным установкам относятся роботы и манипуляторы. Инди- видуальные СЭП или ПЭП установки с одним РО образуют совместно сложную взаимосвязанную электромеханическую систему. В этой системе движение СЭП, действующего по одной координате, может влиять на движение СЭП, действующего по другой координате, внося дополнительные возмущающие воздействия и изменяя тот или иной параметр. В таких установках для сохранения заданного закона перемещения индивидуального СЭП может потребоваться создание адаптивной системы управления (см. подразд. 5.4). Практически взаимосвязь координат проявляется только в некоторых высокодинамичных установках с изменяющимися в процессе движения РО моментами инерции, например, в некоторых типах роботов и антенн. Во всех установках, не относящихся к данному классу, индивидуальные электроприводы рассматриваются как независимо действующие по своим координатам. Основным показателем качества данных электроприводов следует считать точность позиционирования для ПЭП и точность слежения для СЭП, т.е. разность между заданным и отработанным перемещениями в данный момент времени и в данной точке траектории РО. Этот показатель называется также рассогласованием, или ошибкой. Для угловой координаты РО это разность между задающим углом 93 и углом исполнительного вала 9: 5 = Д9 = 63 - 0. Структурным признаком ПЭП и СЭП является наличие обратной отрицательной связи по положению. Образованный с помощью обратной связи замкнутый контур регулирования положения состоит из двух частей (рис. 7.1): системы управления положением (СУ-П) и объекта управления - скоростной подсистемы, в состав которой входят ее система управления (СУ-СП), двигатель СУ-П 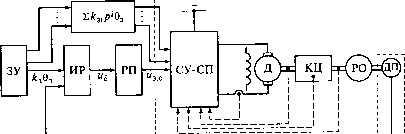 £дп9 Рис. 7.1. Функциональная схема ПЭП и СЭП с программным управлением (Д), кинематическая цепь (КЦ) и рабочий орган (РО). Выделенная в составе ПЭП и СЭП скоростная подсистема представляет собой регулируемый электропривод с выходной координатой - скоростью РО со и входной координатой - напряжением задания скорости ызс, которое формируется с помощью СУ-П. В систему управления положением входят: регулятор положения (РП); измеритель рассогласования (ИР) с выходным напряжением щ = &5Д0; датчик положения (ДП) рабочего органа; задающее устройство (ЗУ), формирующее программу перемещения РО для ПЭП и для тех СЭП, у которых отсутствует физический объект слежения. Задающее устройство может формировать кроме основного сигнала к3в3, пропорционального задающему углу, также , dQ3 , d\ и сигналы его производных кз] кз2 ~г> •••> которые подаются на входы СУ-СП, создавая комбинированную систему управления положением. Для СЭП, отслеживающего произвольное движение физического объекта, являющегося задающим органом, взаимодействие 30 и РО формирует в ИР сигнал рассогласования и5. Примеры выполнения ИР для данных СЭП приведены на рис. 7.2. Сельсинная пара (см. рис. 7.2, а), являясь измерителем рассогласования, имеет два входа - вал сельсина-приемника (С-П), соединенного с РО, и вал сельсина-датчика (С-Д), выполняющего функцию 30. Сигнал угла рассогласования после выпрямления в фазочувствительном усилителе (ФЧУ) подается в виде напряжения щ = wmsinO на вход РП. В копировальных станках (см. рис. 7.2, б) ИР представляет собой копировальный прибор (КП), который вырабатывает напря- 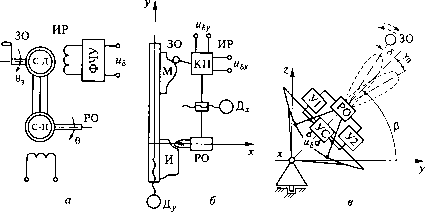 Рис. 7.2. Схемы измерителей рассогласования с сельсинами (я), копировальным прибором (б) и радиолокационной системой (в) жения иЪх и и&у, пропорциональные рассогласованиям между 30 (модель М) и РО (режущий инструмент, обрабатывающий изделие И) по координатам х и у и управляющие двигателями Дх и Дг Для параболической антенной установки (см. рис. 7.2, в) задающим органом является движущийся космический объект (искусственный спутник земли, космический корабль, самолет). Функции РО выполняют облучатели, формирующие диаграммы направленности, смещенные относительно геометрической оси параболического зеркала на углы +у0. Радиосигнал, приходящий от 30, смещенного на угол 5 = ДЭ относительно геометрической оси антенны, создает на двух облучателях разные по амплитуде напряжения. Усиленные с помощью усилителей У1 и У2 напряжения поступают на устройство сравнения УС, на выходе которого выделяется их разностный сигнал щ, приближенно пропорциональный Д0 при малых угловых рассогласованиях между 30 и РО. В зависимости от способа задания перемещения РО можно выделить три режима управления ПЭП и СЭП: программный, когда требуемый закон движения РО заранее известен и формируется с помощью ЗУ в виде сигналов k3Q, k3lpQ3, кз2р2Вь ...; ручной, когда задание на движение осуществляется поворотом вручную командного вала измерительного устройства; автосопровождение, когда закон перемещения объекта слежения заранее неизвестен и управление ведется по сигналу рассогласования между положениями объекта слежения и РО. Первый режим характерен как для ПЭП, так и для СЭП, а второй и третий - только для СЭП. Для рассматриваемых электроприводов можно составить достаточно общую и простую линеаризованную математическую модель в виде структурной схемы с несколькими внешними воздействиями (рис. 7.3). К этим воздействиям относятся: полезный задающий угловой сигнал 03, кроме которого могут дополнительно т вводиться также и его производные k3ipQ3; входные помехи 0„ 1 от объекта сопровождения или задающего устройства; момент нагрузки Мнаг. 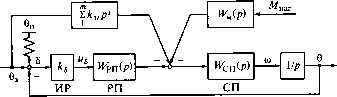 0 ... 35 36 37 38 39 40 41 ... 49 |












