Раздел: Документация
0 ... 38 39 40 41 42 43 44 ... 49 Дополнительная СЭП коррекция 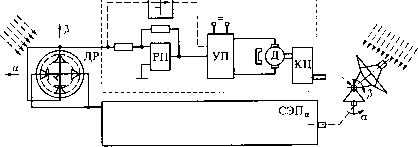 Рис. 7.10. Схема одноконтурного СЭП солнечной печи управления могут служить СЭП копировальных станков, антенных установок космической связи, солнечных печей прямого наведения, некоторых специализированных подъемно-транспортных установок и т. п. В качестве примера СЭП с простейшей системой управления рассмотрим одноконтурный следящий электропривод солнечной печи прямого наведения [21] (рис. 7.10). Двухкоординатная система наведения на Солнце зеркала солнечной печи оборудована двумя СЭП - угломестным (СЭПр) и азимутальным (СЭПа) - с общим фотоэлектрическим датчиком рассогласования ДР и отдельными для каждого электропривода регулятором положения РП, управляемым преобразователем УП и двигателем Д с кинематической цепью КЦ. Такая печь может использоваться как автономная энергетическая установка, преобразующая солнечную энергию в тепловую и электрическую для бытового назначения, а также как термическая установка для различных высокотемпературных технологий - температурных обработки и испытаний материалов, выращивания полупроводниковых кристаллов и т.п. Особенности СЭП солнечной печи: малая мощность (от единиц до десятков ватт) из-за низкой скорости перемещения объекта слежения - Солнца; низкая резонансная частота установки и слабое демпфирование механических колебаний приводом из-за больших передаточных отношений кинематической цепи (десятки -сотни тысяч); значительный момент сухого трения кинематической цепи; трудность измерения скоростей рабочего органа и двигателя. Поскольку объект слежения является мощным световым источником, то наиболее просто реализовать режим автосопровождения на основе фотоэлектрического датчика. Для СЭП СП требуются относительно небольшие добротности по скорости и ускорению (менее соответственно 1 с-1 и 0,1 с-2), которые обеспечиваются одним П- или ПИ-регулятором положения. Для компенсации ошибки от нелинейного момента сухого трения можно рекомен- 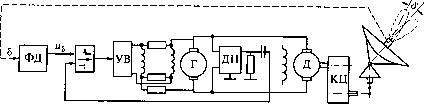 Рис. 7.11. Схема СЭП антенной установки довать дополнительную коррекцию, действующую параллельно с РП и реализуемую на операционном усилителе с релейной характеристикой. Примером более сложной непрерывной системы управления может служить СУ СЭП антенной установки (АУ). Так же, как и солнечная печь прямого наведения, АУ осуществляет функцию слежения за космическими объектами (ИСЗ, космические станции) в режиме автосопровождения по сигналу датчика рассогласования радиолокационного типа. В отличии от СЭП СП мощность СЭП АУ и его требуемые точностные показатели существенно выше. На рис. 7.11 показана схема СЭП, в котором сигнал ошибки 5 формируется в антенной радиосистеме и через фазовый детектор ФД подается на вход усилителя управляемого возбудителя УВ. При использовании в качестве управляемого преобразователя генератора постоянного тока система управления может быть выполнена так, чтобы генератор осуществлял функцию силового ПИ-регулятора положения. Для этого генератор Г с датчиком напряжения ДН включается по схеме с критическим самовозбуждением и охватывается обратной гибкой связью по ЭДС с передаточной функцией асР . (Тср + 1) Внутри контура регулирования включен усилитель с большим коэффициентом усиления (в пределе бесконечным), что позволяет использовать скользящий режим управления. Замкнутый контур ЭДС генератора представляет собой силовой ПИ-регулятор положения с передаточной функцией --, включенный на аТср двигатель Д с кинематической цепью КЦ. При такой структуре СЭП оказывается весьма простым, надежным и достаточно точным, что подтвердила его эксплуатация в системе телевизионной связи «Орбита» в течение ряда десятилетий. Однако при низкой механической резонансной частоте АУ и слабой демпфирующей способности привода, что характерно для тихоходных СЭП, для реализации требуемых высоких точностных показателей систему управления приходится усложнять, чтобы усилить демпфирование и тем самым повысить полосу пропускания скоростной подсистемы. Для этого используется, как показано в подразд. 7.2, дополнительная параллельная коррекция согласно выражению (7.21). В крупных антенных установках применяются многодвигательные электроприводы по каждой координате. В таких приводах могут возникать противофазные колебания роторов двигателей, для подавления которых также требуются корректирующие средства в составе системы управления. На рис. 7.12 приведен вариант двухдвигательного СЭП с тири-сторными преобразователями ТП1, ТП2 с отдельными контурами тока и общим контуром скорости для одной координаты антенной установки. В СЭП предусмотрены режим программного управления от цифрового программного устройства ПУ с цифроаналоговым преобразователем ЦАП и режим автосопровождения (АС) с использованием измерительного устройства ИУ, формирующего сигнал ошибки и5. Выбор того или иного режима осуществляется с помощью ключей Кпу и КАС. Два двигателя Д1 и Д2 через редукторы Р1 и Р2 приводят во вращение исполнительный вал антенной установки. Каждый двигатель (Д1, Д2) получает питание от индивидуального тиристорного преобразователя (ТП1, ТП2), входящего в состав контура тока с настройкой регулятора (РТ1, РТ2) на модульный оптимум. Каждый контур тока получает задание на ток двигателя с выхода своего усилителя (У1, У2). Характеристики управления У1 и У2 имеют смещение, создающее при нулевом входном сигнале разнонаправленные моменты двигателей Д1 и Д2, компенсирующие люфты в кинематической цепи двухдвигательного привода. Оба двигателя входят в состав одного общего контура скорости с формируемой преобразователем П отрицательной обратной связью по полусумме сигналов тахогене-раторов ТП и ТГ2, т.е. по среднему значению скоростей двух двигателей. Пропорциональный регулятор скорости РС настраивает контур на модульный оптимум. Регулятор положения РП с интегральной составляющей типа ПИ или ПИД настраивается по условию требуемой точности и желаемой динамики данного СЭП. Однако оптимальные настройки даже всех контуров не дают тех динамических показателей, которые имел бы однодвигатель-ный электропривод с жестким одномассовым звеном. Упругая механическая передача, связывающая двигатели с подвижной частью антенной установки, обусловливает возникновение резонансных колебаний в данной трехмассовой электромеханической системе. 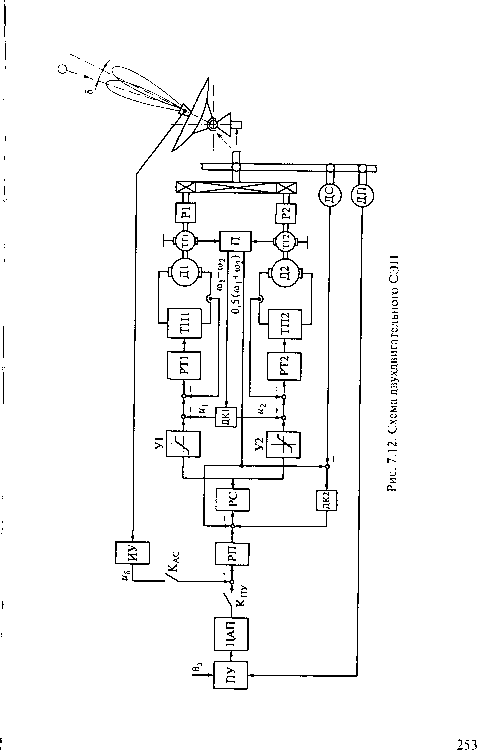 Некоторая несимметрия в значениях параметров и моментов сопротивления по каналам двигателей может вызывать взаимные противофазные колебания скоростей двух двигателей при неизменной скорости АУ. Для устранения данных колебаний используется устройство демпфирующей коррекции ДК1, которое подает на входы контуров тока сигналы, пропорциональные разности скоростей двигателей (Aco = co! -со2), равные по величине, но противоположные по знаку, т.е. и, = (-1)£Дсо, где /= 1, 2 - номер контура тока. При полной симметрии каналов двух двигателей их можно рассматривать как один канал с одним эквивалентным двигателем с удвоенными моментом и коэффициентом жесткости объединенной кинематической цепи. При этом в скоростной подсистеме СЭП сохраняется возможность возникновения резонансных слабодемпфированных колебаний объединенных масс двухдвигательного привода и подвижной массы установки, взаимных противофазных колебаний средней скорости двигателей и скорости исполнительного вала (рабочего органа). Для устранения данных колебаний при наличии датчика скорости ДС исполнительного вала может быть использовано устройство демпфирующей коррекции, описанное выше. В приведенной схеме входным сигналом устройства коррекции ДК2 служит разность скоростей эквивалентного двигателя (сод = = 0,5(с0 + со2)) и исполнительного вала (соРО) в масштабе одной скорости (например, приведенной к валу двигателя). Данный входной сигнал по (Од - соРО по сравнению с сигналом по соРО снижает на два порядка дифференцирование в передаточной функции ДК2. В тихоходных СЭП, когда отсутствует ДС, но имеется цифровое программное устройство ПУ и цифровой датчик положения ДП, коррекция, осуществляемая устройством ДК2, может быть выполнена программным способом с использованием цифрового сигнала ДП. Контрольные вопросы 1.Поясните понятие «квазиустановившийся режим» следящего электропривода. В чем его отличие от понятия «установившийся режим» электропривода? 2.Какие задающее устройство и тип регулятора положения потребуются для позиционного электропривода при условии отработки заданного перемещения с допустимыми значениями ускорения и скорости и нулевой ошибкой позиционирования? 3.Каково максимальное значение ошибки трехконтурного СЭП с ПИ-РТ, П-РС, ПИ-РП с оптимальными настройками при отработке вхолостую синусоидального воздействия 03 = 2°-sin0,5f, если 7 = 0,01 с? 4.Чему равна частота задающего сигнала для СЭП с типовыми настройками ПИ-РТ, П-РС и РП, если скоростная ошибка при П-РП равна ошибке по ускорению при ПИ-РП и 7 = 0,01 с? 5.Какой регулятор положения требуется для позиционного электропривода, чтобы разные по величине перемещения отрабатывались бы с максимально допустимым по току ускорением? 6.Составьте передаточную функцию контура напряжения СЭП, в который входят генератор с критическим самовозбуждением и входной усилитель, работающий в скользящем режиме (см. рис. 7.11). Какой порядок астатизма имеет данный СЭП? 7.Поясните назначение корректирующих устройств ДК1 и ДК2 в двух-двигательном СЭП (см. рис. 7.12). 8.Какую функцию выполняют усилители У1 и У2 в двухдвигательном СЭП (см. рис. 7.12)? 0 ... 38 39 40 41 42 43 44 ... 49 |












