Раздел: Документация
0 ... 37 38 39 40 41 42 43 ... 49
t Рис. 7.6. Оптимальная по быстродействию тахограмма ПЭП В отличие от СЭП, для позиционного электропривода зона перемещения рабочего органа не задается и может быть выбрана произвольной, а задаются только начальное и конечное положения РО и точность позиционирования. Тип траектории выбирается из дополнительных условий и ограничений. Таким условием может быть, например, минимум времени отработки заданного перемещения при ограничении максимальных значений скорости и ускорения. Построенная по данному условию тахограмма ПЭП, оптимальная по быстродействию, имеет трапецеидальный вид (рис. 7.6). Реализовать подобную тахограмму можно при ПЭП с программным управлением (см. рис. 7.1). Для этого задающее устройство (ЗУ) должно формировать соответствующие тахограмме сигналы, пропорциональные задающим углу 93, скорости со3, ускорению 83 с учетом ограничений максимальных значений юзтах и езтах. В зависимости от величины углового перемещения 9ЗП тахограмма может быть треугольной при 8зп < С0зтах/£зтах или трапецеидальной при 6ЗП > Юзтах/езтах • Команда на торможение ПЭП должна даваться ЗУ в момент времени, когда пройденный путь 93 в сумме с допустимым тормозным путем 9ТД0„ сравняется с заданным перемещением, т. е. 93 + 9Тдоп = 93 п. Структурная схема ЗУ, формирующего оптимальную тахограмму ПЭП, приведена на рис. 7.7. Входной сигнал ЗУ - напряжение ы31, задающее требуемую величину перемещения рабочего органа, а выходной сигнал - напряжение и3, задающее закон перемещения, соответствующий оптимальной тахограмме. В схеме предусмотрены два ограничителя уровней - скорости (ОУ1) (изстах = = .сИзша,) и ускорения (ОУ2) (w3ymax = А..с,.,..,,). функциональный преобразователь (ФП), формирующий сигнал задания тормозно- 2 го пути изтп = к----, и два интегратора, формирующих сигна- 2з max лы со3 (И1) и 93 (И2). Данное ЗУ позволяет реализовать комбинированное управление в ПЭП с помощью дополнительных сигна- ОУ1 ОУ2 И1 И2 од \1Р (ю3) (е3) ФП 7 РП %10 Рис. 7.7. Структурная схема задающего устройства ПЭП лов задания скорости изс и ускорения изу, что позволяет при простейшем пропорциональном регуляторе положения РП компенсировать ошибки по скорости и ускорению согласно выражению (7.15). Для электроприводов постоянного тока с простой подвижной частью в виде одномассового звена широкое применение нашли системы управления, построенные по принципу подчиненного регулирования координат. Позиционный и следящий электроприводы, выполненные по данному принципу, представляют собой трехконтурные системы с контурами тока, скорости и положения. При стандартных настройках контуров на модульный или симметричный оптимум с помощью П- и ПИ-регуляторов соответствующие структуры систем управления могут быть названы типовыми, так как они применяются для широкого класса электроприводов различного назначения и мощности. В качестве преобразователя, питающего двигатель, используются в основном полупроводниковые управляемые преобразователи, тиристор-ные или транзисторные. Структурная схема следящего электропривода с подчиненным регулированием координат и дополнительным заданием по скорости приведена на рис. 7.8. Штриховой линией выделена скоростная подсистема (СП), которая настроена на модульный или симметричный оптимум. ИР РП СП WpC0>) - к.тОО Для определения точностных показателей типовых структур СЭП требуется выполнить настройку контура положения на модульный или симметричный оптимум в зависимости от типа регулятора положения (РП). Используя принцип оптимизации при подчиненном регулировании координат (см. подразд. 5.3), можно получить выражения добротности и ошибок СЭП для разных вариантов типовых регуляторов скорости и положения (табл. 7.1). Сопоставляя по точностным показателям в квазиустановившихся режимах варианты типовых структур, приведенные в табл. 7.1, можно отметить следующее. Наиболее динамичной оказывается структура с П-РС и П-РП с дополнительным заданием по скорости. По каналу управления данный СЭП имеет астатизм второго Таблица 7.1 Выражения добротности и ошибок СЭП для типовых регуляторов скорости и положения
* П-регулятор с дополнительным заданием по скорости и3 с = fc3iC03. -и. (8 + 1)(27> + 1) ** ПИД-регулятор с передаточной функцией Wm =--- порядка и добротность по ускорению, большую в -у = 2 раза, 327; 128712 чем у структуры с ПИД-РП, и в Ц = 4 раза, чем у структуры с ПИ-РП. Аналогичные соотношения имеют и ошибки по ускорению при равенстве нулю ошибок по скорости. Наименее динамичной оказывается структура с ПИ-PC и ПИ-РП, у которой доб- 512Г2 „ ротность по ускорению в -уТ" = !° раз меньше, чем у наиболее динамичной структуры. Однако по каналу момента нагрузки данный СЭП обладает наибольшим порядком астатизма, равным двум. Наибольший астатизм, равный трем, по каналу управления имеет структура с ПИ-PC и П-РП с дополнительным заданием по скорости. Это означает, что от задающего сигнала ошибка появится только при изменении ускорения, т. е. это будет ошибка по рывку. Ошибки при задающих сигналах 03 = const, со3 = const; s3 = const у данной структуры СЭП равны нулю. Таким образом, повышение порядка астатизма снижает ошибки СЭП для квазиустановившихся режимов с достаточно низкой частотой входных воздействий. Однако в режимах отработки скачков воздействий возрастают динамические ошибки при повышении астатизма и системы становятся более чувствительными к изменению коэффициентов усиления. Поэтому астатизм v = 2...3 целесообразно реализовывать в структурах СЭП с комбинированным управлением, которые имеют такую же устойчивость, как у структур с v = 1. У позиционных электроприводов, для которых характерно программное задание на перемещение, к типовым структурам могут быть отнесены структуры с комбинированным управлением. При задании перемещения без программирования закона движения типовыми являются простые структуры с П-РП и с П-РС или ПИ-PC. Однако при стандартной настройке РП характер отработки перемещений разной величины в зависимости от степени насыщения PC будет различным: в соответствии с настройкой; с большим перерегулированием; с затягиванием процесса. Для получения одинакового характера процессов позиционирования при отработке перемещений разной величины с примерным постоянством ускорения е = const = гдоп требуется, чтобы напряжение РП в момент начала торможения соответствовало бы начальной скорости торможения, т.е. "РП = £5&рПЛ6 = "з.с ~ К.ст- Здесь сот = 2едоп&т, где Эт - угловой тормозной путь, рад. "рп 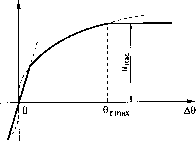 Рис. 7.9. Параболическая характеристика регулятора положения Так как 9Т = А9, то "рп = Ао.сл/2ед0пет. (7.19) Характеристика управления РП приобретает параболический вид с бесконечно большой производной в начале координат. Для обеспечения устойчивости контура положения начальный участок характеристики заменяется прямолинейным участком с коэффициентом, определяющим желаемый процесс позиционирования «в малом» (рис. 7.9). Максимальное напряжение РП инас определяется максимально допустимой скоростью привода при отключенной обратной связи по положению. Когда подвижная часть привода представляет собой двухмассо-вое звено, параболический РП оказывается недостаточно эффективным. В этом случае задача оптимального позиционирования с заданными уровнями максимальной скорости и постоянного ускорения решается с помощью программного управления с дополнительными заданиями по скорости и ускорению (см. рис. 7.7). Для редукторных тихоходных СЭП с двухмассовым механическим звеном с упругой связью стандартная оптимизация скоростной подсистемы по принципу подчиненного регулирования может оказаться неэффективной. В системе возникают низкочастотные резонансные колебания, слабо демпфируемые приводом из-за токоограничения и слабого влияния упругого момента на контур тока. Улучшить динамические показатели СП в структуре с подчиненным регулированием можно введением дополнительного параллельного корректирующего устройства, оказывающего демпфирующее действие на СП наподобие вязкого трения в механическом звене. Синтез данного корректирующего устройства, определяющий структуру и параметры его предаточной функции WaK(p), выполняется методом дополнительной параллельной коррекции - приравниванием передаточной функции скоростной подсистемы Wcn с корректирующей обратной связью желаемой передаточной функции: l + Wa.K(pWcniP) откуда я.к(Р) = 1 1 (7.29) Согласно выражению (7.20) и без учета обратной связи по упругому моменту w () Р*Лр)[Т22Р2НТр + АТржгл)р+1] Ркс(р)(Тг2Р2 + ТрР + \) *сп(7> + 1)ксп(ТрР + \) где DKC(p) - оператор контура скорости двигателя, настроенного на модульный оптимум, Dkx.(p) = р\ТГр(Трр + 1) + 1] + 1; Т2 - резонансная постоянная времени РО, с, Т2 = \- , Т0 - постоян- \С12 ная времени вязкого трения механической передачи, с, Тр = р/с12. Принимая DKC{p) « 4ГЦ + 1 и вводя дополнительный фильтр с постоянной времени Гф, получаем: --/ГГ-п- <™> «2 ЫТрр + 1)(Тфр + \) Желаемого уровня демпфирования резонансных колебаний в СП можно достичь настройкой коррекции по условию лРжел = 27г(с;жел - с;мех),(7.22) где мех - собственный коэффициент демпфирования механической передачи, примерно равный 0,03...0,06. При сжел > л/2/2 перерегулирование демпфированного механического звена не превышает 5 %. При наличии зазоров и других нелинейностей в СП линейная коррекция (7.21) может оказаться недостаточно эффективной. Тогда потребуется некоторая нелинейная коррекция алгоритма, реализуемая с помощью, например, фаззи-управления. 7.3. Примеры непрерывных систем управления следящего электропривода постоянного тока Современные системы программного управления положением электропривода выполняются, как правило, цифровыми, так как задать требуемый закон перемещения рабочего органа (РО) проще и точнее с помощью цифровой техники, чем аналоговой, а цифровые датчики положения могут быть выполнены на большую точность, чем аналоговые. Непрерывные системы управления характерны для СЭП с режимом автосопровождения, когда закон движения не задан, а управление ведется по сигналу рассогласования, а также для СЭП со вспомогательным режимом ручного управления, в котором для сигнала рассогласования используется сельсинная пара. Примерами СЭП с непрерывными системами 0 ... 37 38 39 40 41 42 43 ... 49
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
