Раздел: Документация
0 ... 36 37 38 39 40 41 42 ... 49 Рассмотрим передаточные функции в составе структурной схемы. Регулятор положения (РП) обеспечивает необходимые запасы устойчивости и точностные показатели замкнутого контура положения. Для повышения порядка астатизма СЭП в РП вводится интегральная составляющая, что позволяет компенсировать ошибки в установившихся режимах. Передаточную функцию для типовых РП, используемых как в непрерывных, так и в цифровых СУ-П, можно представить в таком виде: Wm(p) = km-p,(7.1) где АРП(р) - оператор, равный единице при р = О и определяемый типом РП; v - требуемый порядок астатизма СЭП, вносимый с помощью РП. Для П-РП при v = 1 Ат(р) = 1; для ПД-РП при v = 1 и ПИ-РП при v = 2 АРП(р) = 7> + 1; для ПИД-РП при v = 2 и (ПИ)2-РП при v = 3 Ат(р) = (Тк1р+1)(Тк2р+1). Порядок астатизма v = 3 можно считать практически максимальным и используемым редко, так как при этом СЭП сохраняет устойчивость только при конечном диапазоне возможного изменения коэффициента усиления системы управления. Скоростная подсистема (СП) с двигателем постоянного тока имеет в общем случае передаточную функцию вида Wcnip) = ApL = *сп>4сп(/>) (72) ЩЛР) dcmp" +dcmp"-1 + ... + dn lp + V где kcn - передаточный коэффициент СП, рад/(Вс); Асп(р) - оператор, равный единице при р = О и зависящий от типа механического звена, представляющего подвижную часть электропривода. Для СП с П-РС и одномассовым механическим звеном Аси(р) = 1; для СП с П-РС и двухмассовым звеном Асп(р) = Тр(р) + 1, где Тр - отношение коэффициентов вязкого трения р и жесткости с12 упругого элемента, Тр = р/сп; для СП с ПИ-PC и одномассовым звеном Acnip) = Тк{р) + 1; для СП с ПИ-PC и двухмассовым звеном Лсп(р) = (Ткр+ 1) (Трр+ 1). Величина Тр мала из-за малости параметра р, и соответствующая ей частота \/Тр перекрывает полосу пропускания СП. Поэтому величиной Тр в выражении для Асп(р) можно пренебречь. Момент нагрузки на рабочем органе в данной расчетной модели приводится ко входу СП через передаточную функцию Мтт(р) спРсп(/>) где Вы(р) - оператор, зависящий от типов регулятора скорости и механического звена электропривода и равный 1 при р = 0; Рсп(/0 - жесткость механической характеристики СП, Н • м • с/рад, зависящая от типов регулятора скорости и обратных связей СП. Для СП, представляющей собой разомкнутую систему преобразователь-двигатель с кинематической цепью и рабочим органом РспСр) = Р; Для сп с подчиненным регулированием и с П-РС Т Рсп(/0 = Рз =Р--> гДе - механическая постоянная времени электропривода; - некомпенсируемая постоянная времени; для Т 1 СП с подчиненным регулированием и с ПИ-PC $Сп(р) = Рт oF-• 47ц ыцр Последнее операторное выражение может быть условно названо «астатической жесткостью», так как в астатической системе регулирования скорости для установившегося режима рсп = °°. Линеаризованный измеритель рассогласования ИР представляется в нашей модели пропорциональным звеном с передаточным коэффициентом к5. Приведенные выше передаточные функции отдельных составных частей расчетной модели СЭП позволяют получить результирующие передаточные функции: для разомкнутого контура положения - w<n\Я Ат{р)АсП(р).(74) для замкнутого контура положения - W(pS- W°(P) = A™(p)A™ip)(7.5) КР) 1 + о(Р) D{p) Здесь D(p) = Dcuip) + APUip)Acnip) = doP + dxplA +... + dn ,p +1(7.6) V представляет собой характеристический полином замкнутого СЭП, порядок / которого на v выше порядка полинома Dcnip). Передаточный коэффициент D брпсп(7.7) РП называется добротностью СЭП по v-й производной выходного угла. 7.2. Точностные показатели следящих электроприводов Приведенные выше передаточные функции позволяют получить общие выражения для ошибок СЭП: от основного задающего воздействия - l + WQ(p) D(p) А от момента нагрузки - К(р) = влр) Мнаг;(7.9) D{p) АРспОО от основного задающего воздействия при П-РС и П-РП, но с учетом дополнительных воздействий по производным задающего угла, связанных с настройкой их параметров по условию кз1 = =К2 - dcn„ l/kcn, •) кзт = dcnn m+i/kcn спо р„.т + dcm рП тА + + „ , ч dcnn-m dcnn mрm+Ie 83.к(/>) =-Я71-л /а ; (7Л0) по каналу момента нагрузки - MpH-f-(7.11) Д/>) А Реп Из выражения (7.10) следует, что при дополнительных воздействиях в виде т производных задающего угла 93 СЭП приобретает астатизм порядка v = т + 1 даже при пропорциональных РП и РС. Однако по каналу нагрузки согласно формуле (7.11) система управления оказывается статической, т.е. v = 0. Данный способ получения желаемого порядка астатизма проще реализовать в цифровых системах программного управления, в которых дополнительные задающие сигналы k3lpQ3, k3lp2Q3 формируются как разности первого и второго порядка цифрового сигнала 93[л]. Кроме ошибок 53 и 8М в данных электроприводах имеет место ошибка от помех на входе (0Г[), которые обусловлены различными измерительными погрешностями. Например, бортовые качания движущегося по орбите искусственного спутника связи дают помеху в задающем сигнале орбитального движения, пульсации напряжения питания в ЗУ и ИР, квантованность по уровню в цифровых входных устройствах и т.д. Эти помехи малы относительно полного полезного сигнала. Однако в высокоточных СЭП, в которых допустимая ошибка также мала, помехи соизмеримы с ней и должны учитываться. Данные помехи носят стохастический характер, и ошибка от них определяется как среднеквадратичная (5П) через спектральную плотность помех „(со) [3]: 5п =-?Иусо)2п(со)Ло,(7.12) 71 о где Ж(усо) - модуль передаточной функции по каналу управления замкнутого СЭП. 240 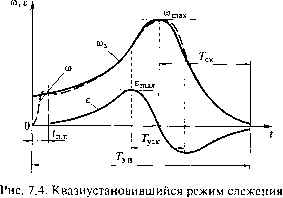 Полученные выражения для ошибок СЭП в операторной форме позволяют определить эти ошибки как оригиналы от соответствующих изображений, т. е. как функции времени в любых динамических режимах, если заданы внешние воздействия в зависимости от времени. Процессы позиционирования и слежения при перемещении РО из одной позиции в другую могут быть самые разнообразные, однако их общей особенностью является тот факт, что продолжительность заданного перемещения, как правило, существенно больше собственного времени переходного процесса электропривода. Такой режим слежения, в котором времена максимальных изменений перемещения Тзп, скорости Гск, ускорения ТУСК намного превышают время переходного процесса tnn, т.е. Тзп » tnn; Тек» ?п.п; Туск „.п (рис. 7.4), может быть назван квазиустановив-шимся [19]. В этом режиме временем переходного процесса можно пренебречь, следовательно, можно пренебречь динамическими ошибками и учитывать только соответствующие установившиеся значения ошибок, которые определяются из выражений (7.8) -(7.11): для СУ-П по рассогласованию - §з-;(7.13) р mmr APcnOO для комбинированной СУ-П - pm+1Q 9 Терехоп 241 §М-Ч(7-16) АРсп где т - число производных задающего угла, вводимых в СЭП как дополнительные задающие сигналы; Dm+1 - добротность СЭП с комбинированным управлением, c~(m+,)Dm+l = Dl/dcn„ m. Из приведенных выражений для ошибок следует, что при увеличении любым способом порядка астатизма СЭП уменьшаются его ошибки по каналу управления в квазиустановившихся режимах. Ошибки по каналу нагрузки также снижаются при увеличении v, но только за счет интегральных составляющих в регуляторах положения и скорости. Ошибка, или рассогласование, СЭП - это его основной технологический показатель. Однако абсолютное значение ошибки еще не полностью характеризует качество СЭП в отношении его точности. Чем меньше значение 8 можно получить в СЭП, тем выше качество, в первую очередь, измерителя рассогласования и датчика рассогласования, но еще не СЭП в целом. Действительно, сравним два СЭП: в первом реализуется точность 8 = Г при скорости со = 5/с, а во втором 8 = Г при со = 50°/с Можно ли утверждать, что первый СЭП по своему точностному качеству лучше, чем второй СЭП? На этот вопрос следует дать отрицательный ответ, так как при одной и той же аппаратуре, измеряющей 8, второй СЭП обеспечит точность 8 = Г при скорости в 10 раз большей, т.е. при со = 50/с, поскольку его добротность по скорости D, = 50 с1 в 10 раз выше, чем у первого СЭП. Следовательно, второй СЭП при той же ошибке имеет большую производительность, а при той же производительности - меньшую ошибку, чем у первого СЭП. Таким образом, наряду с абсолютным значением ошибки другим важным точностным показателем СЭП является его добротность по той производной угла, порядок которой равен порядку астатизма v. Для системы управления по рассогласованию г) PV®3 аРПСП .С7 17) °3vРП для комбинированной системы управления jy Рт+]з KskpuKcn(7 18) где 53v и 83m+1 - установившиеся значения ошибок при движении СЭП с pvQ3 = const. Когда СЭП обладает астатизмом порядка v, все установившиеся значения ошибок по каналу управления приpQ3 = const для /< v равны нулю. В квазиустановившихся режимах СЭП динамические ошибки занимают небольшой интервал времени и проявляются в основном в начале и конце процесса слежения, когда задающий сигнал прикладывается или снимается скачком. При этом влияние динамических ошибок на величину интегральной среднеквадратичной ошибки слежения весьма незначительно. Большее значение динамические ошибки приобретают во вспомогательных режимах - «поиска» и «захвата» объекта слежения, быстрого «переброса» рабочего органа из одной позиции в другую. Максимальные значения ошибок в динамических режимах СЭП важны для определения требований к измерителю рассогласования, к запасам электропривода по скорости и ускорению. Анализируются динамические ошибки на типовых расчетных режимах скачкообразного изменения задающего сигнала. К таким режимам относят отработку скачков заданий угла, скорости и ускорения (рис. 7.5). По допустимому максимальному значению ошибки 8тах определяются ширина линейного участка характеристики управления измерителя рассогласования и необходимые запасы по скорости сотах и ускорению етах СЭП (см. рис. 7.5, б, в). При неизменном моменте нагрузки ошибка по каналу нагрузки 8М имеет место только в СЭП с v = 1 и определяется согласно выражению (7.16). В режиме отработки скачка задающей скорости (со3 = const; 03 = со30 установившееся значение ошибки согласно (7.13) 8СК = со3/Д для v = 1 и 8СК = 0 для v = 2. В режиме отработки скачка задающего ускорения (s3 = const; со3 = s3t; 03 = e3t2/2) установившаяся ошибка линейно нарастает для v = 1 и остается неизменной 8уск = e3/D2 для v = 2. 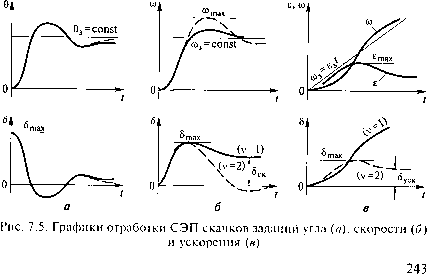 0 ... 36 37 38 39 40 41 42 ... 49 |












