Раздел: Документация
0 ... 33 34 35 36 37 38 39 ... 49 водах, в которых системы программного управления реализованы на основе микропроцессорной техники, информацию о векторах потокосцеплений электрической машины получают косвенным путем на основе ее математических моделей. При этом базовыми являются структуры управления с косвенной ориентацией по вектору потокосцепления ротора и модульным принципом построения систем управления. Последнее создает возможность комбинаций различных структур управления моментом и скоростью АД, включающих как прямое (с помощью тахогенератора), так и косвенное (по модели) определение реальной скорости двигателя. Выбор структур управления определяется технологическими требованиями к электроприводу и его эксплуатационными особенностями. На рис. 6.39 представлен пример функциональной схемы системы векторного частотного управления электропривода с отрицательной обратной связью по реальной скорости АД [30]. Система имеет два основных канала управления - угловой скоростью со и модулем потокосцепления ротора т2 АД, а также два подчиненных им внутренних контура регулирования составляющих тока статора /ь.и /1у в осях х и у ортогональной системы координат, вращающейся с синхронной скоростью ю0эл магнитного поля двигателя. Сигнал задания скорости АД щ предварительно поступает на вход задатчика интенсивности ЗИ, формирующего на выходе два сигнала управления. Основной сигнал со3 определяет задание скорости АД с темпом, обеспечивающим ограничение рывков и ускорений в соответствии с технологическими требованиями к электроприводу и максимально допустимыми динамическими перегрузками по току и электромагнитному моменту АД. Дополнительный сигнал dca/dt определяет с учетом коэффициента передачи км, пропорционального приведенному к валу АД результирующему моменту инерции двигателя, задание динамической составляющей электромагнитного момента Мтн В результате его суммирования в сумматоре Z3 с сигналом Мс, пропорциональным статическому моменту сил сопротивления на валу АД, формируется сигнал задания электромагнитного момента АД Мзр. При этом определение реального сигнала Ме и практическая реализация задания электромагнитного момента требуют наличия датчика статического момента на валу АД. Однако техническая сложность, заметные метрологические погрешности существующих датчиков статического момента на вращающихся валах электрических машин и отсутствие серийного их выпуска, как правило, ограничивают их применение в системах электропривода. Появляющийся на выходе сумматора X, сигнал рассогласования 5а основного сигнала управления со3 и сигнала со реальной скорости АД с выхода тахогенератора ТГ, пропорциональный абсолютному скольжению АД, поступает на вход пропорционально-интегрального регулятора скорости РС. Выходной сигнал РС иРС формирует сигнал задания Мъ электромагнитного момента, необходимого для полной компенсации скольжения АД. Результирующий сигнал A/3v на выходе сумматора Z2 определяет полное задание электромагнитного момента с учетом возможных изменений статической и динамической составляющих нагрузок на валу АД. Подобная комбинированная система задания момента (по возмущению и отклонению) применяется в основном для электроприводов, в которых требуются повышенные динамические показатели качества регулирования. В наиболее распространенных электроприводах канал управления по возмущению, как правило, используется редко, поскольку требует дополнительной и не всегда точно известной информации о реальных значениях статической нагрузки и моментов инерции на валу двигателя. К тому же два параллельно действующих канала управления по отклонению и возмущению требуют более тщательной их настройки и взаимного согласования. С учетом этого в структурах управления электроприводом предусматривается возможность либо отключения всего дополнительного канала по возмущению, либо сохранения канала коррекции лишь по динамической составляющей момента. Результирующий сигнал М,Е ограничивается блоком Б01 на уровне задания, соответствующего выбранному максимальному значению электромагнитного момента АД. Задание этого значения определяется внешними сигналами управления Мтах, и Л/тах2. В зависимости от энергетических режимов работы электропривода блоки MIN и МАХ обеспечивают ограничение минимальных и максимальных допустимых моментов АД. Так, при отсутствии дополнительного блока рекуперативного торможения в силовой цепи выпрямителя на входе автономного инвертора напряжения преобразователя частоты ПЧ, для ограничения максимально допустимой рекуперируемой активной мощности РЛК и, соответственно, ограничения перенапряжения на емкостном фильтре входного выпрямителя ПЧ в режиме рекуперативного торможения АД в блоке А2 в функции от скорости АД или частоты его питания/1 формируются сигналы Мо1 и Мо2, уменьшающие уровень задания электромагнитного момента АД. Функциональная связь между мощностью Рж и частотой /, с учетом ее максимального значения /,тах, качественно отраженная в блоке А2, определяется математической моделью АД и корректируется при автоматической идентификации параметров электропривода. Ограничение электромагнитного момента АД связано и с выбором максимально допустимого тока статора /1тах. С этой целью в блоке A3 с учетом максимального значения напряжения питания зи PC + 3 A/3.pБ01 £2 «3z «PCsAf3 Al A2 71 MIN MAX БД ЗИТ M. ¥2 be - / 1 ук y2 V2 1 u. dc мд мп. A3 Tymax -lmaxi It ПИД V2n A4 I2t lmax A lmax /1 lmax A8 V2hom /l 1 A5 ¥23 A9 V23 A6 A7 Рис. 6.39. Функциональная схема системы управления с косвенной ориентацией по вектору потокосцеплен ия ротора АД 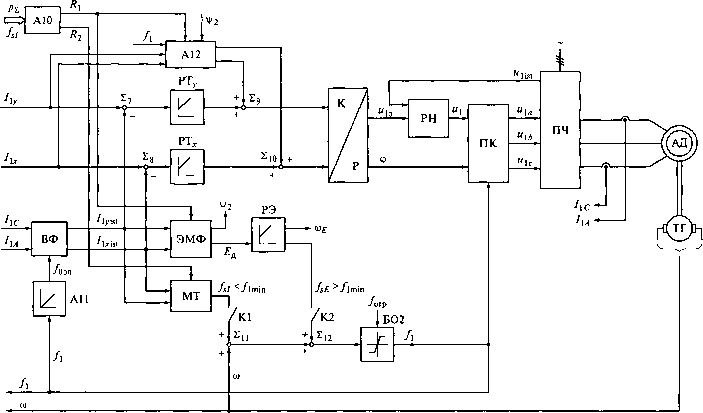 Окончание рис. 6.39 АД (7,max и реального значения составляющей тока статора по оси х 1и определяется вектор максимально допустимой составляющей тока статора /1>тах. Выходной сигнал блока произведения /и.тах на потокосцепление ротора Ч2 пропорционален реальному максимально допустимому электромагнитному моменту АД и контролирует ограничение выходного сигнала Л/з£. Для постоянства задания электромагнитного момента при изменении потокосцепления ротора в соответствии с определением момента по выражению (6.57) используется блок БД деления сигнала Af*zHa выходе Б01 на сигнал, пропорциональный *Р2. На выходе БД формируется сигнал задания Ilyi составляющей тока статора по оси у. Для коррекции по динамической составляющей момента на валу АД в системе управления электроприводом предусматривается возможность подключения на вход сумматора Z4 сигнала отрицательной обратной связи, пропорционального производной по скорости АД. Этот сигнал формируется устройством А1. Ограничение скорости изменения момента АД за счет уменьшения темпа изменения составляющей тока статора Iiy обеспечивается задатчиком интенсивности тока ЗИТ. Его выходной сигнал, суммирующийся в сумматоре Е6 с корректирующим сигналом отрицательной обратной связи IiyK с выхода пропорционально-интегрально-дифференцирующего регулятора ПИД, определяет задание на составляющую тока статора 11у На вход ПИД поступает выходной сигнал сумматора Х5, в котором сравниваются сигналы, пропорциональные текущему Udhi и установленному максимально допустимому Udm3x напряжениям на выходе силового выпрямителя ПЧ. Рассматриваемый узел способствует управлению моментом АД во время кратковременных отключений или возможных уменьшений напряжения питающей сети ПЧ. При кратковременных отключениях напряжения питающей ПЧ сети управление может быть продолжено за счет рекуперации кинетической энергии вращающегося вала АД в цепь выпрямителя ПЧ. При нагрузках с большим моментом инерции и высокой рабочей скоростью подобная поддержка рабочего состояния преобразователя может быть весьма продолжительной. Сигнал задания потокосцепления ротора у2з формируется в блоке А5. Функциональная связь между реальной частотой / выходного напряжения преобразователя и потокосцеплением ротора АД определяет постоянство у2з на уровне задания номинального потокосцепления ротора у2ном при/j <fimax«fi„olt и уменьшение Ф2з при/, >fimax. Последний вариант обеспечивает работу АД в зоне регулирования скорости выше номинальной при постоянстве номинального напряжения питания статора. Сигнал/тах, корректирующий допустимую максимальную частоту выходного напряжения ПЧ, формируется расчетным путем по модели АД в блоке А4 в зависимости от заданного максимально допустимого напряжения питания статора £7lmax. Значение £/,тах определяется напряжением Udc на выходе силового фильтра выпрямителя ПЧ с коррекцией по сигналу мд, пропорциональному максимально возможной глубине модуляции выходного напряжения ПЧ. Сигнал у2з задания потокосцепления ротора с выхода блока А5 в результате перемножения на выходной сигнал блока А7 преобразуется в сигнал у*2з, изменяющийся во времени темпом, определяющим время возбуждения АД. Лишь по истечении этого времени, когда возбуждение АД достигает установившегося значения, в системе управления ПЧ появляется логический сигнал на разрешение управления преобразователем со стороны сигнала м3 управления электроприводом. Отметим здесь полное подобие условию подключения к питающему напряжению якорной цепи двигателя постоянного тока с независимым возбуждением лишь при наличии его магнитного потока. Значение времени возбуждения АД может быть задано внешним сигналом te блока А7 или же определено при автоматической идентификации параметров АД. В системе управления предусматривается возможность адаптации потока ротора к нагрузке АД, способствующая снижению суммарных магнитных потерь в машине при уменьшении нагрузки. С этой целью сигнал /,,,3 задания составляющей тока статора по оси у поступает в блок А8, где при заданных минимально допустимом значении потока ротора \]/2min и коэффициенте адаптации ка формируется сигнал, определяющий поток ротора в зависимости от нагрузки АД. При включенном контуре адаптации потока ротора блок А9 выделяет минимальное значение сигнала задания \/2з. В соответствии с выражением (6.57) и заданием потокосцепления ротора в блоке А6 по математической модели АД определяется сигнал задания составляющей тока статора 11х Составляющие 1]уи /1хтока статора сравниваются в сумматорах £7и Е8 со своими текущими значениями Ilyisl и Ilxist, которые выделяются в блоке ВФ векторного преобразования токов IiA и /,св цепи обмоток фаз А и С статора АД. Угол ф0э;, поворота осей координат х и у, вращающихся со скоростью электромагнитного поля АД, формируется в блоке All в соответствии с частотой/,. Сигналы рассогласования задающих и реальных значений составляющих тока статора поступают на входы соответствующих регуляторов РТхи РТ,.. Выходные сигналы регуляторов после суммирования в сумматорах Z9 и Z10 с сигналами компенсации составляющих в соответствии с выражением (6.53) и учета внутренней обратной связи по ЭДС двигателя, сформированными в блоке А12, поступают на координатный преобразователь К/Р. В зависимости от его входных сигналов, пропорциональных заданию со- 0 ... 33 34 35 36 37 38 39 ... 49 |












