Раздел: Документация
0 ... 34 35 36 37 38 39 40 ... 49 ставляющих выходного напряжения преобразователя в осях х, у, на выходе К/Р формируются сигналы иХз и ср, определяющие соответственно амплитуду и фазу вектора напряжения в двухфазной системе координат а, р, неподвижной относительно статора АД. Регулятор напряжения РН, на входе которого сравниваются сигналы задания иХз и реального значения напряжения Hlisl на выходе выпрямителя ПЧ, обеспечивает стабилизацию выходных напряжений последнего. Сигналы задания выходного напряжения преобразователя их и ф совместно с сигналом fu определяющим частоту выходного напряжения ПЧ, трансформируются в преобразователе координат ПК в эквивалентные сигналы иХа, и14> иХс трехфазной системы координат, определяющие выходные напряжения ПЧ. Формирование сигналаfx задания частоты выходных напряжений ПЧ обеспечивается суммированием в сумматорах Еи и Y,n сигнала со реального значения скорости АД, поступающего с тахогенератора ТГ, и сигналов fsIJsE, определяющих частоту скольжения АД соответственно в функции тока и ЭДС двигателя. Вычисление fsI осуществляется в блоке МТ математической модели двигателя по току, на вход которого совместно с текущими значениями Ilyist и 11хЫ составляющих тока статора в осях х, у подается сигнал R2, пропорциональный сопротивлению ротора АД. В блоке ЭФМ математической модели АД, на вход которого кроме текущих значений Ilyisl и 1ХхЫ составляющих тока статора поступает сигнал Rx, пропорциональный результирующему сопротивлению цепи статора, формируются два выходных сигнала - ц>2, определяющий потокосцепление ротора, и Ею пропорциональный ЭДС двигателя. Принцип формирования v/2 и Ед структурно отражен на рис. 6.36. На выходе ПИ-регулятора ЭДС двигателя (блок РЭ) формируются два сигнала (см. рис. 6.39) - со£, пропорциональный частоте вращения ротора, и fsE, определяющий коррекцию задания частоты /. В системе управления с помощью ключей К1 и К2 реализуется логика управления, обеспечивающая раздельную подачу сигналов fs, и fsE на входы Zn и Zi2b зависимости от заданной частоты выходного напряжения ПЧ. При малых частотах (f<fXmXn), когда замкнут ключ К1 и разомкнут ключ К2, действует контур коррекции по току, обеспечивающий компенсацию падения напряжения на сопротивлении статора. При больших частотах (f>fXmm), когда замкнут и ключ К2, дополнительно действует контур коррекции по ЭДС двигателя, обеспечивающий стабилизацию скорости АД. Выбор частоты flmin ~ (3 ...6) Гц, при которой переключаются контуры коррекции, определяется экспериментально по аналогии с настройкой соотношения (У, ! в разомкнутых структурах скалярного управления АД (см. подразд. 6.2.2). Максимально допустимая частота выходного напряжения ПЧ ограничивается сигналом Хгр блока Б02. Сигналы Rx и R2 формируются в блоке А10 тепловой модели АД, в которой поступает совокупность сигналов рт, включающих в себя информацию о сопротивлениях цепи статора и ротора, определенных при автоматической идентификации параметров двигателя, степени влияния на них температуры собственно двигателя и окружающей среды, условий охлаждения двигателя, о наличии выходных фильтров преобразователя. Представленные на рис. 6.39 функциональные блоки в основном реализуются программным путем в микропроцессорной системе управления электропривода. В микроконтроллере реализуются и интерфейсные функции по связи с датчиками токов, напряжений и скорости двигателя. В соответствии с принципом работы рассматриваемой системы управления на рис. 6.40 приведены качественные зависимости ее основных переменных в функции от момента АД при постоянном сигнале задания скорости (см. рис. 6.40, а-ж) и в функции от сигнала управления скоростью при постоянном статическом моменте Мс ф 0 (см. рис. 6.40, з-о). Как результат действия ПИ-регулятора скорости механическая характеристика АД имеет в области нагрузок Мс< Мстлх абсолютную статическую жесткость (линия / на рис. 6.40, а), а при Мс > Мстгх механическая характеристика за счет ограничения выходного сигнала регулятора скорости и ПИ-регуляторов составляющих тока статора в осях х, у абсолютно мягкая (линия 2- 3 на рис. 6.40, а). Стабилизация скорости связана с увеличением выходного сигнала регулятора скорости иРС и соответствующим увеличением сигнала задания M\z электромагнитного момента АД (см. рис. 6.40, ж). Последнее приводит к увеличению напряжения Ux и частоты fx на выходе ПЧ по мере увеличения статической нагрузки МсХ (см. рис. 6.40, б, в) и, соответственно, к увеличению по сравнению с исходной скоростью со00 скорости идеального холостого хода со01 (при МсХ) двигателя. Штриховые линии механических характеристик АД на рис. 6.40, а отражают перемещение исходной характеристики М0 при увеличении нагрузки. При Мс= Мстах когда произойдет ограничение выходного сигнала иРСна уровне максимального значения M"3iZmax блока Б01, и при абсолютной скорости АД, равной нулю, напряжение Ux и частотаfx будут соответствовать значениям (точки 3 на рис. 6.40, б, в), при которых скорость идеального холостого хода АД равна со0с (см. рис. 6.40, а). По мере увеличения нагрузки составляющая Ттока статора, определяющая момент АД, также увеличивается (см. рис. 6.40, г), а составляющая 1Хх и определяемое ею потокосцепление ротора у2 сохраняются постоянными (см. рис. 6.40, д, е). 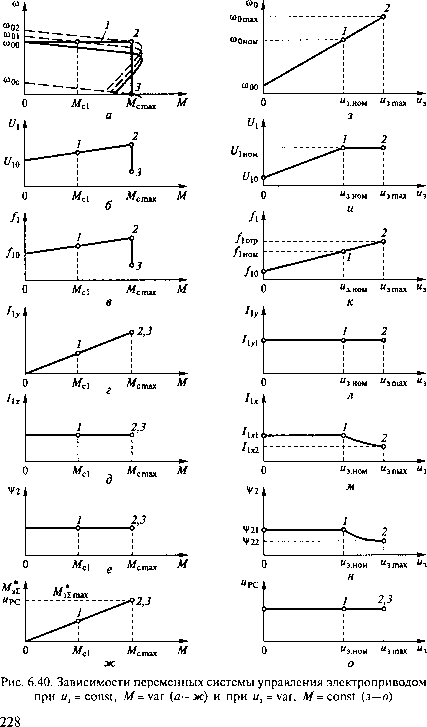 При отсутствии сигнала задания скорости АД (и3 = 0) и наличии на валу двигателя постоянного реактивного момента сил сопротивления Мс ф 0 начальные выходное напряжение U10 и частота fl0 преобразователя равны нулю. Если же момент сил сопротивления активен, то выходное напряжение 6% и частота /10 преобразователя соответствуют значениям, при которых начальная скорость идеального хода АД со00 ф 0 и механическая характеристика двигателя обеспечивает при со = 0 момент Мс (см. рис. 6.40, и, к). Соответственно этому моменту определяются и начальные сигналы M3ldi, Iiyi, Wpci (см. рис. 6.40, ж, л, о). При этом сигналы 1Ш и v/2i определяют номинальное потокосцепление ротора (см. рис. 6.40, м, н). По мере увеличения сигнала и3 напряжение C/j и частота fx на выходе преобразователя ПЧ также увеличиваются. При и3 = изноы выходное напряжение ПЧ и его частота достигают номинальных значений UlH0MuflH0U. В соответствии с ними устанавливается номинальное значение скорости идеального холостого хода АД со0ном. Дальнейшее увеличение и3 и / сопровождается постоянством напряжения £/, = с71ном на выходе ПЧ и переходом работы АД в зону уменьшения потокосцепления ротора за счет снижения составляющей [1х тока статора (см. рис.6.40, м, н). Максимальный момент АД при этом также уменьшается. При и3 = изтах скорость идеального холостого хода АД устанавливается на максимально заданном уровне со0тах> соответствующем /1огр (точка 2 на рис. 6.40, з-о). Составляющая тока статора и соответствующее ей потокосцепление ротора устанавливаются при этом на минимальном уровне 11х2 и \/22 (см. рис. 6.40, м, н). Возможность избежать применения тахогенератора, требующего точной и надежной установки на валу АД, реализуется в системах, где обратная связь по скорости заменяется обратной связью по ЭДС двигателя. Так, в схеме, показанной на рис. 6.41, сигнал обратной связи по ЭДС двигателя со£ поступает в сумматор Ei с выхода блока ЭФМ математической модели АД, а формирование частоты / выходного напряжения ПЧ осуществляется суммированием в Еп и Еп сигнала задания скорости со3и сигналов fsiHfsEc выходов соответственно блока МТ математической модели двигателя по току и регулятора ЭДС двигателя (см. рис. 6.39). Блоки ЭФМ и МТ, а также остальные блоки системы управления электроприводом (на рис. 6.41 сгруппированы в блоке СУЭ) и функциональные связи между ними остаются при этом без изменения. Качество регулирования скорости в подобных системах управления зависит от степени соответствия математической модели ЭФМ и установленных в ней параметров реальной электрической машины и, как правило, заметно ниже, чем в системах с датчиками скорости.  Ряд технологических объектов (натяжные, намоточно-размо-точные механизмы и т.п.) требуют регулирования и стабилизации момента на валу двигателя при постоянстве его заданной скорости. Решение подобной задачи реализуется в системе управления электроприводом при наличии датчика скорости - тахогенератора ТГ на валу АД (рис. 6.42). В данной системе сигнал задания момента двигателя и31Л подается на имеющий релейную характеристику блок РБ, а также на вход блока Б01 (блок ограничения максимальных моментов Л/тах1, Mmix2 на валу АД). Выходной сигнал и3 блока РБ определяет задание скорости АД, а ограничение задания максимальной и минимальной скоростей АД обеспечивается сигналами сотах и comin. Результат суммирования на сумматоре Z, сигнала и3 и сигнала отрицательной обратной связи по скорости двигателя соос поступает на вход регулятора скорости PC, а выходной сигнал последнего - на вход блока Б01. Полярность сигнала изм определяет направление скорости и, следовательно, направление момента двигателя. Задание предельно допустимых максимальных моментов АД ограничено сигналами Мшт[ и М0ф2. Остальные блоки управления электроприводом, представленные на рис. 6.39 и сохранившие свои функциональные связи, сгруппированы на рис. 6.42 в блоке СУЭ. Механическая характеристика электропривода в подобной системе при Мс < Мтах имеет абсолютную статическую жесткость при скорости, соответствующей заданию сигналами сотах или comin. При Мс = Мтах механическая характеристика имеет абсолютно мягкий характер, стабилизируя заданный сигналом изм электромагнитный момент АД. Контрольные вопросы 1.Каким способом можно изменять у вентильного двигателя (ВД) с питанием от неуправляемого выпрямителя момент короткого замыкания, скорость идеального холостого хода? 2.Каким воздействием на датчик положения ротора можно установить опережающую на 30° коммутацию ключей инвертора? Нарисуйте для данной коммутации диаграмму момента трехфазного ВД в зависимости от угла поворота ротора. 3.Поясните с помощью рис. 6.1, как можно осуществить смену направления вращения ВД. 4.Нарисуйте механическую характеристику двухконтурного электропривода с ВД, соответствующую процессу пуска при отключенном тахо-генераторе. 5.Назовите примеры технологических установок, в которых целесообразно применение асинхронного электропривода с регулированием скорости за счет изменения напряжения на статоре двигателя. 6.Поясните назначение функциональных блоков ЗИ, PC, РТ, СИФУ и элементов VD1, VD2, VD3 в схеме на рис. 6.18. 0 ... 34 35 36 37 38 39 40 ... 49 |












