Раздел: Документация
0 ... 29 30 31 32 33 34 35 ... 49 со Omax I <»01 ю00 m0mm
"PC "РСп М] 1 Щ мтт а Мх М2 Л/тах в м Vi.fi /ю
Л/, Mn мт м Рис. 6.29. Механические характеристики (а), зависимости выходных напряжения и частоты ПЧ (б), а также напряжения регулятора скорости (в) от момента в системе ПЧ-АД с обратной связью по скорости со - реальная скорость АД при заданной нагрузке на его валу. При 5S ф 0 сигнал мРС на выходе регулятора скольжения, суммируясь с сигналом uyi = иу(при /, < /1тах), за счет интегральной составляющей передаточной функции регулятора А5 обеспечивает такое приращение сигнала управления и{ преобразователем частоты, при котором частота выходного напряжения ПЧ становится равной /,0(1 +5а). Одновременно с изменением частоты за счет функционального преобразователя ФП меняется по сравнению с начальным напряжением с710 и выходное напряжение преобразователя /У, (см. рис. 6.29, б). При этом скорость двигателя восстанавливается до заданного значения со00, т. е. обеспечивается абсолютная жесткость механической характеристики АД (линия 1 на рис. 6.29, а). При превышении максимально допустимого тока статора АД (/, > /,тах и, соответственно, М > Мтях), регулятор скольжения должен быть исключен из работы, например, путем ограничения его выходного сигнала иРС на уровне иРСтах (см. рис. 6.29, в). При этом вступают в работу отрицательные обратные связи по току статора с регулятором A3, обеспечивая за счет одновременного уменьшения частоты и напряжения статора АД до их минимальных значений/,шп и Uimin ограничение момента АД при со= 0 на уровне Mmax (линия 2 на рис.6.29, а). Минимальная синхронная скорость двигателя co0min будет соответствовать значениям /jmin и Uimin, а механическая характеристика - линии 3 (см. рис. 6.29, а). PC Д"з.с А"у fcpc+=- Ли PC РСР ПЧ £пч 1+W АД ! Л«>о Дсо ЛЛ/с wrrp ДЛ/ - 1 Дсо Ди„ Рис. 6.30. Структурная схема системы ПЧ -АД с обратной связью по скорости Устойчивость и динамические показатели качества регулирования скорости АД определяются выбором параметров пропорциональной и интегральной составляющих передаточных функций регуляторов А5 и A3. На рис. 6.30 представлена структурная схема линеаризованной системы, функциональная схема которой приведена на рис. 6.28, при работе АД на участке механической характеристики в пределах значений абсолютного скольжения sa < sK. На схеме приняты следующие обозначения [8]: Р - модуль жесткости линеаризованной механической характеристики АД (Р = 2Л/к/(со0ном 5К)); Тэ - эквивалентная электромагнитная постоянная времени цепей статора и ротора АД, определяемая по формуле Тэ= 1/(со0эл ,H0MsK), где со0элном - угловая скорость электромагнитного поля АД при его номинальной частоте питания /ном = 50 Гц (со0эл ном = 2nfiH0M = = 314 с-1)- Для АД общепромышленного исполнения sK = 0,05...0,5 (меньшие значения характерны для мощных двигателей), Тэ = = (0,006...0,06) с; кпч - передаточный коэффициент ПЧ (кпч - Асо0/ДиРС = 2тс А/1/ /(р„ДмРС). При работе АД в зоне частот/j <УН0М = 50 Гц и номинальном сигнале управления преобразователем ну.ггчном соотношение A/i/Амрс =У1/иу.ПЧном; Tm - постоянная времени цепи управления ПЧ, которая при высоких частотах модуляции выходного напряжения промышленных ПЧ (2...50 кГц) не превышает 0,001 с. Передаточная функция ПИ-регулятора скорости W?c(p) = AwpC/Awy = кРС + 1/( ТрСр). Передаточная функция цепи обратной связи по скорости двигателя Woc{p) = AwQ с/Асо = кох. При номинальном сигнале управления электроприводом, равном мзсном, и соответствующей ему номинальной скорости АД В соответствии со структурной схемой АД его результирующая передаточная функция по отношению к отклонению Асо0 Wa (р) = Дсо/Асоо = 1/(7; ТмР2 + Тыр + 1). При ТМ>4ТЭ Wa(p)=mT0lp+l){T02p+l), где T0i 1 27; l+.l 471 j 02 1 27Л 1-Л 4П Если отнести постоянные Г02 и 7пЧ к малым некомпенсиру-емым постоянным и в качестве оценки их влияния принять Гц = = Тог + Тич, то при настройке электропривода на модульный оптимум постоянная интегрирования и коэффициент передачи пропорциональной части регулятора РС определятся в соответствии с (5.8) так: Трс = о.с пчйц Тр, кРС = ?о 1 / 7"РС. Системы частотно-токового управления. При частотно-токовом управлении АД питается от преобразователя частоты (ПЧТ), работающего в режиме источника тока. Подобный преобразователь может быть реализован на основе автономного инвертора тока (рис. 6.31, а), в состав которого входят управляемый выпрямитель УВ, обеспечивающий за счет отрицательной обратной связи по току нагрузки (датчик тока ДТ и регулятор тока РТ) совместно с фильтрующим дросселем Др режим управляемого источника постоянного тока, и инвертор тока ИТ, выполняющий функцию формирования требуемой частоты выходного тока. Реализация ПЧТ возможна и на основе преобразователей частоты с непосредственной связью НПЧ (рис. 6.31, б), в которых для каждой из вентильных групп имеется внутренний контур регулирования тока, а частота выходного тока НПЧ задается генератором частоты ГЧ. Контур регулирования тока ПЧТ, как правило, астатический, и параметры его ПИ-регулятора определяют так же, как и для ПИ-регулятора тока в электроприводах постоянного тока. Отличительной особенностью ПЧТ является возможность двустороннего обмена энергией между питающей его сетью и двигателем с нереверсивным УВ за счет изменения направления проти-во-ЭДС инвертора и сохранения направления в нем выпрямленного тока. 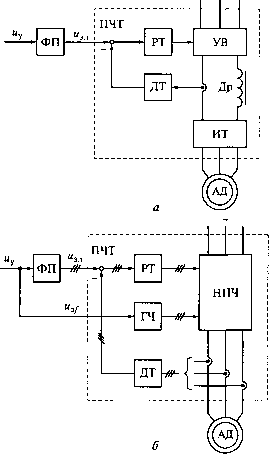 Рис. 6.31. Функциональные схемы систем ПЧ-АД при питании от источников тока на основе автономного инвертора (а) и преобразователя частоты с непосредственной связью (б) Управление двигателем производится с помощью сигналов задания выходного тока изт и частоты u3f преобразователя ПЧТ. Оба сигнала, в свою очередь, зависят от общего сигнала управления иу. При питании АД от источника тока вследствие размагничивающего действия тока ротора магнитный поток АД заметно изменяется при изменении абсолютного скольжения. Поэтому для стабилизации магнитного потока АД при изменении его нагрузки в канал задания тока ПЧТ вводится функциональный преобразователь ФП, определяющий задание тока статора 7, в функции абсолютного скольжения sa. Зависимость /, = F(5а) и пропорциональ- Диз.т: h
SUy Рис. 6.32. Зависимость тока статора от абсолютного скольжения АД ная ей зависимость ызт = Ф(иу) являются нелинейными функциями (рис. 6.32), которые на рабочих участках механических характеристик АД отвечают условию /,2 = s. Кривые этих зависимостей симметричны относительно оси тока (задания тока), что определяется симметрией механических характеристик АД в двигательном и генераторном режимах его работы. Часто при технической реализации ФП пользуются линейной аппроксимацией зависимости /, = f(sj (штриховая линия на рис. 6.32). Здесь значения /1тах и «зттах определяют максимально допустимый ток статора и сигнал его задания, a Ilmin и H3Tmin - ток холостого хода АД и сигнал его задания. Известные положительные свойства АД при его питании от ПЧТ, такие как независимость электромагнитного момента АД от частоты и возможность при заданном токе статора и абсолютном скольжении, равном критическому, обеспечить больший момент, чем при питании от источника напряжения, могут быть реализованы лишь в замкнутой системе, контролирующей абсолютное скольжение и ток двигателя в функции нагрузки. На рис. 6.33 представлена функциональная схема подобной системы частотно-токового управления АД. Источник тока реализован на основе управляемого выпрямителя УВ, ток нагрузки 1Н которого задается выходным напряжением «РТ регулятора тока РТ, пропорциональным разности напряжений изт на выходе ФП и иот датчика тока ДТ. Стабилизация скорости АД обеспечивается за счет регулятора скорости PC, на входе которого сравниваются напряжения задания скорости нзси обратной связи мосс выхода тахогенератора ТГ. Особенность схемы в том, что здесь автоматически формируются сигналы, пропорциональные абсолютному скольжению и заданию синхронной скорости АД. Сигнал, пропорциональный sa, формируется на выходе PC, поскольку изс пропорционально заданию скорости со0з идеального холостого хода АД, а иос - текущей скорости ротора со, т.е. PCБО "рс "PC "БО «3.1 3 "рт 9 9 9 тН- ув пчт фчс "фчс + ~2 цс + 1"су су ДТ 34 il -ц- ит Др! fbh АД .тг Рис. 6.33. Функциональная схема замкнутой системы ПЧ-АД с частотно-токовым управлением иРС = (изс - и0с) = (со0з - со) = 5асо0ном- Если передаточный коэффициент формирователя частоты скольжения ФЧС выбрать таким образом, чтобы с учетом со0ном его выходной сигнал мФЧС был пропорционален (со0з - со), то после суммирования этого сигнала с выходным сигналом ису согласующего устройства СУ, пропорциональным текущему значению со, на выходе сумматора Х2 устройства задания частоты 34 инвертора тока ИТ преобразователя ПЧТ будет сформирован сигнал "с = «фчс + «су = (<»оз - со) + со = со0з. В итоге на выходе 34 будет сигнал задания частоты выходного тока ПЧТ и3/ = изс = со0з, определяющий задание синхронной скорости АД. Поскольку электромагнитный момент двигателя пропорционален квадрату тока статорной обмотки (М=12), который, в свою очередь, пропорционален абсолютному скольжению (7,2 s sa), выходной сигнал PC пропорционален sa и является сигналом задания электромагнитного момента АД. Поэтому выходным напряжением иБ0 блока ограничения БО на выходе PC можно воздействовать и на ограничение максимального момента АД. Перед пуском двигателя (щ с = 0, wPC = 0) сигнал задания частоты преобразователя из/=0 и за счет характеристики ФП (w3Tmin ф 0) в АД задается постоянный ток, обеспечивающий поток намагничивания и режим динамического торможения АД. С увеличением мзс 0 ... 29 30 31 32 33 34 35 ... 49 |
||||||||||||||||||||||||||||||||||||||












