Раздел: Документация
0 ... 27 28 29 30 31 32 33 ... 49 скорость на предельной характеристике 2 при а =а max (со2 = со, + + (М{ - М2)/Вжел). Подстановка (6.34) в (6.33) позволяет определить напряжение изс для задаваемой скорости: изс=к amax«>i -Ф1<»2 +каисм(ю2 - со,)(6 35) а max ~~ Ф1 Напряжение насыщения РС итс = иРСтах определяет значение amin, соответствующее граничной по максимальному моменту механической характеристике 3 (см. рис. 6.20, б). Промежуточные точки механической характеристики 5для замкнутой системы регулирования скорости при полученных по (6.34), (6.35) значениях кРС и кзх определяются с помощью механических характеристик разомкнутой системы электропривода для ряда значений а в диапазоне от amin до атах. По выбранному значению а с помощью регулировочных характеристик СИФУ, РТ и РС (см. рис. 6.21) определяются напряжение иу на входе РС и скорость со = (изс - иу)/кос. Затем полученное значение со отмечается на механической характеристике 4, соответствующей данному углу а (см. рис. 6.20, б). При I> /отс начинает действовать отрицательная обратная связь по току статора, поддерживая его на уровне 1ОТС за счет снижения выходного напряжения ТПН (электромеханические характеристики 1, 2, 3, 4 на рис. 6.22, а). Линия 1 на рис. 6.22, б отражает вид механической характеристики двигателя при /отс = const. Точки пересечения этой линии с механическими характеристиками электропривода при различных напряжениях задания скорости ызс1, изс2, из.съ «З.с4 соответствуют точкам пересечения линии постоянства /отс с электромеханическими характеристиками АД при тех же заданиях скорости (см. рис. 6.22, а). Как видно на рис. 6.22, б, пусковой момент АД Мпо, соответствующий режиму токоограничения двигателя, меньше пускового момента Мпедля естественной ме-
мпо мпем аб Рис. 6.22. Электромеханические (а) и механические (б) характеристики АД при 1> /отс ханической характеристики АД. Определить скорость АД соогр, при которой начинает действовать обратная связь по току, можно на основании регулировочных характеристик СИФУ преобразователя (см. рис. 6.21). При со < соогр и 1> /отс угол открывания тиристоров в соответствии со схемой на рис. 6.18 и статическими характеристиками на рис. 6.21 a = amax - £a&PT("pcmax - k0TAl) = aorp + kakPJk0TAl. Здесь а0ф = атах-£а£рТмРСтах; А1=Аа/какРТкол, где AI - отклонение тока статора от заданного тока /отс. Относительная ошибка стабилизации 101С, определяемая как А /отс = Да/(какРТи0ТС), при какР1 » 1 весьма мала, и при постоянстве заданного значения /отс момент АД в режиме токоограничения \t м р /р 1у1ОТр 1Г*П2 ОГр/ 1 НОМ5 где Мп - пусковой момент АД при номинальном напряжении питания АД. Значение кРГ может быть определено по заданному желаемому статизму токовой отсечки (А1/10ТС)жел: крт = жел Полученные по условиям статики значения кРС и &РТ затем должны быть проверены по условиям динамики электропривода. Как динамический объект ТПН может быть представлен инерционным звеном с коэффициентом передачи knH = dUJduPC и постоянной времени Тим, связанной с дискретностью фазового управления тиристорами преобразователя [5]. В общем случае кин является функцией углов а, ср и скольжения двигателя s. Угол ер заметно меняется от скольжения лишь при s < sK (sK - критическое скольжение), а в диапазоне sK < s < 1, в котором в основном и осуществляется регулирование скорости АД, изменения ср незначительны. Тогда при линейной зависимости а=/(иРТ) (см. рис. 6.21) может быть вполне линеаризована и зависимость U{ = f(uP7) с коэффициентом передачи [8]: п.н = ДА/Дир-р =i71hom/hpthom, где (71ном и «рт.ном - соответственно номинальные значения первой гармоники выходного напряжения ТПН и напряжения управления преобразователем. Постоянная времени цепи фазового управления ТПН для приведенного на рис. 6.18 варианта его силовой части определяется максимальным временем запаздывания т3~ Тин = 0,033 с [5]. Асинхронный двигатель даже при упрощенном его математическом описании (без учета влияния электромагнитных переход- 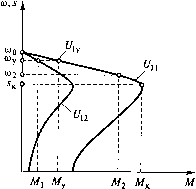 Рис. 6.23. Механические характеристики АД ных процессов в цепях статора и ротора) и изменении лишь напряжения питания статора остается нелинейным динамическим объектом, поскольку его электромагнитный момент зависит и от напряжения питания, и от скорости двигателя, т.е. M=f(Ub со). Примем, что для механической характеристики АД (рис. 6.23) при напряжении питания Un точка установившегося режима характеризуется координатами /У, = Ux Из соу, Мг Если придать приращение А6, напряжению питания АД в окрестности этой точки, то возникнут приращения момента AM и скорости Дсо. Тогда результирующий момент АД в центре разложения механической характеристики АД в ряд Тейлора М = My + AM = My + дМ\ дсо t7i=f/]y;co=co Дсо + дМ \ 5/7, Ui=U iy ;со=ш. М +каА(л + киАих = My +АМа+АМ и- •Д/У, = (6.36) Здесь АМт = кшАю и AMV= kvAUx - приращения момента двигателя, вызванные соответственно приращением его скорости и напряжения питания; кш = -дМ/да - коэффициент изменения момента двигателя при отклонении его скорости при /У, = const, Д Ux = 0; ки= дМ/dU- коэффициент чувствительности момента АД к напряжению питания статора при со = const, Дсо = 0. Физический смысл коэффициента кш можно показать на примере механической характеристики АД при Uly = Uu = const (см. рис. 6.23). Здесь при изменении скорости Дсо = соу-со2 имеет место изменение момента АМа = Му- М2, и, следовательно, ка = дМ/да ~ * AMjAco = (My - М2)/(Юу - со2) определяет жесткость р механической характеристики АД в области установившейся скорости. При 0 < s < sK коэффициент ка < 0, т. е. обратная связь по скорости АД в данном диапазоне скольжений является отрицательной. При sK < s коэффициент кю> 0 и режим работы АД становится неустойчивым. С уменьшением жесткости механической характеристики АД по мере снижения напряжения питания статора уменьшается и коэффициент кш. При работе двигателя на устойчивом участке его естественной механической характеристики коэффициент кы наибольший и определяется модулем жесткости этой характеристики: ка = р = 2Л/к/со0 ном jk Sv. Зависимость коэффициента киот скорости АД ясна из его механических характеристик при различных напряжениях питания /У1у и Ul2 (см. рис. 6.23). Здесь при постоянстве скорости соу = const, Дсо = 0 и изменении напряжения Д/У, = Uiy- Ul2 имеет место изменение момента АМи= Му - Ми и, следовательно, ки= дМ/dU « « АМц/AUi = (My - M2)/(U[y - Ui2). При синхронной скорости АД изменение напряжения на его статоре не приводит к изменению электромагнитного момента АД и при соу = со0 коэффициент ки=0. Максимальное значение kUrmx имеет место при номинальном напряжении на статоре UlHOM и критическом скольжении двигателя sK. Поскольку электромагнитный момент АД пропорционален квадрату приложенного к статорной обмотке напряжения, то с учетом перегрузочной способности АД по моменту Хм = Мк/Мноы для его естественной механической характеристики критический момент двигателя может быть определен как MK = Xu(Ux/UlHOM)2MHmi. Тогда для критического скольжения АД Мн0м II2 1 ном ) и при номинальном напряжении Ux = с71ном М K-U maxl Лм тт U \ном Если воспользоваться основным уравнением движения электропривода М- Мс = Jdta/dt и подставить в него вместо М правую часть уравнения (6.36), а вместо Мс-Му, то при работе двигателя на устойчивом участке механической характеристики, т. е. при 0 < s < sK AM= krjAUx - каАи> = JpAa. Тогда передаточная функция АД между приращением скорости и управляющим воздействием при ДМС = 0 Wv{p) = Дсо/Д = ku/(Jp + kj = ка/(Тир +1), где кД - передаточный коэффициент АД, кл = ки/ка; Ты - электромеханическая постоянная времени двигателя (Тм = J/ka = Р). Передаточная функция АД между приращением скорости и изменением статической нагрузки при AUX = 0 WM(p) = Дсо/ДЛ/с = \/(Jp + kj = ТмР + 1)). Структурная схема электропривода с регулируемым напряжением на статоре АД (см. рис. 6.18), линеаризованная в пределах рабочего участка механической характеристики двигателя при токе статора меньшем /отс, представлена на рис. 6.24. Здесь совместно с передаточными функциями ТПН и АД приведены передаточные функции П-регулятора тока lVPT(p) = AwPT/AwPC = кРТ, ПИ-регулятора скорости Щс(р) = Амрс/Аму = кРС + \/{Т?ср) и цепи обратной связи по скорости W0.c(p) = Аи0 с/Асо = кос. Если принять за малую постоянную времени Гц постоянную Т,!.и « Тм, то при настройке электропривода на технический оптимум постоянная интегрирования и передаточный коэффициент пропорциональной части регулятора РС определятся так: Трс = о.сртп.нцп.н! крс = Ти/Т?с. При желании свести к минимуму влияние электромагнитных постоянных времени цепей статора и ротора АД, не учтенных в определении Гм, полезно принять ац = 3... 5. В соответствии со структурной схемой на рис. 6.24 при ПИ-регуляторе скорости регулировочная характеристика системы ТПН-АД определится как со = изс/кос, а механические характеристики электропривода для всего диапазона изменения сигнала управления скоростью при токе статора 1< /отс должны иметь абсолютную жесткость. Однако реально за счет ограничения выходного напряжения ТРН на уровне номинального значения напряжения АД, а также снижения коэффициента передачи ки вплоть до нуля при малых нагрузках и коэффициента кш в области нагрузок, близких критическому моменту АД, жесткость механических
Рис. 6.24. Структурная схема асинхронного электропривода с регулируемым напряжением на статоре характеристик вблизи предельных характеристик будет заметно меньше. Поскольку уменьшение скорости АД связано с уменьшением напряжения на обмотках его статора, а допустимый по условиям нагрева двигателя момент Ма011 при этом уменьшается в обратно пропорциональной зависимости от скольжения, то область применения замкнутых систем асинхронного электропривода с воздействием лишь на напряжение статора ограничена механизмами, у которых момент нагрузки при снижении скорости заметно уменьшается, например, механизмами с вентиляторной нагрузкой. 6.2.2. Системы скалярного управления частотно-регулируемого асинхронного электропривода Принцип скалярного управления частотно-регулируемого асинхронного электропривода базируется на изменении частоты и текущих значений модулей переменных АД (напряжений, магнитных потоков, потокосцеплений и токов цепей двигателя). Управляемость АД при этом может обеспечиваться совместным регулированием либо частоты/, и напряжения £/,, либо частоты/; и тока /[ статорной обмотки. Первый способ управления принято трактовать как частотное управление, второй - как частотно-токовое управление [1, 13, 14]. Выбор способа и принципа управления определяется совокупностью статических, динамических и энергетических требований к асинхронному электроприводу. Скалярный принцип частотного управления является наиболее распространенным в асинхронном электроприводе. Ему свойственна техническая простота измерения и регулирования переменных АД, а также возможность построения разомкнутых систем управления скоростью. Основной недостаток подобного принципа управления заключается в трудности реализации желаемых законов регулирования скорости и момента АД в динамических режимах. Связано это с весьма сложными электромагнитными процессами, протекающими в АД. Скалярное частотно-токовое управление АД характеризуется малым критическим скольжением и постоянством критического момента при постоянстве питающего АД тока и изменении его частоты [8]. Однако в разомкнутых системах подобное управление практически исключено, поскольку с увеличением нагрузки (скольжения) резко падает магнитный поток АД и для обеспечения желаемых перегрузочных способностей АД по моменту требуется заметное превышение номинальных значений напряжения питания и тока статора. 0 ... 27 28 29 30 31 32 33 ... 49 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












